Zahlreiche führende Experten und hochbegabte Nachwuchswissenschaftler haben am Buch „Soziale Roboter“ mitgewirkt. Von Kathrin Janowski und Elisabeth André stammt die Abhandlung „Nichtverbales Verhalten sozialer Roboter: Bewegungen, deren Bedeutung und die Technik dahinter“. Aus dem Abstract: „Nichtverbale Signale sind ein elementarer Bestandteil der menschlichen Kommunikation. Sie erfüllen eine Vielzahl von Funktionen bei der Klärung von Mehrdeutigkeiten, der subtilen Aushandlung von Rollen oder dem Ausdruck dessen, was im Inneren der Gesprächspartner vorgeht. Viele Studien mit sozialen Robotern zeigen, dass vom Menschen inspirierte Bewegungsmuster ähnlich interpretiert werden wie die realer Personen. Dieses Kapitel erläutert daher die wichtigsten Funktionen, welche die jeweiligen Bewegungsmuster in der Kommunikation erfüllen, und gibt einen Überblick darüber, wie sie auf Roboter übertragen werden können.“ Das von Oliver Bendel herausgegebene Werk ist Anfang November 2021 erschienen und kann über link.springer.com/book/10.1007/978-3-658-31114-8 bezogen werden.
Abb.: Nichtverbale Signale sind Teil der Kommunikation
Der von Oliver Bendel herausgegebene Springer-Band „Soziale Roboter“ enthält, das Vorwort mitgerechnet, 30 Beiträge führender Expertinnen und Experten. Von Klaus Mainzer stammt die Abhandlung „Soziale Robotik und künstliches Bewusstsein: Technische und philosophische Grundlagen“. Aus dem Abstract: „Die Entstehung natürlichen Bewusstseins ist Gegenstand interdisziplinärer Forschung von Gehirnforschung, Neuro- und Kognitionspsychologie und Philosophie. Eine technische Umsetzung von Bewusstsein in der Robotik setzt eine hochentwickelte KI-Forschung voraus. Voraussetzung ist eine hybride KI, die symbolische KI und subsymbolische KI verbindet: Erkenntnistheoretisch entspricht hybride KI einem ‚hybriden‘ kognitiven System wie dem menschlichen Organismus, in dem die (‚unbewusste‘) Verarbeitung von Wahrnehmungsdaten mit (‚bewusstem‘) logischen Schließen verbunden wird. Hybrider KI werden daher höhere Intelligenzgrade zugesprochen als der Reduktion auf symbolische oder subsymbolische KI, die bereits in technischem Einsatz sind. Humanoide Roboter sind Hybridsysteme im Sinn hybrider KI mit symbolischer Wissensrepräsentation und verhaltensbasiertem Agieren, das die sensorisch-motorische Leiblichkeit und Veränderung von Umweltsituationen berücksichtigt.“ Ein Abschnitt „behandelt die Grundlagen humanoider Robotik im Human Robotics Project (HRP) mit seinen kognitivistisch-funktionalistischen Grundlagen, konnektionistischen Grundlagen bis zu hybriden kognitiven Robotern auf der Grundlage hybrider KI“. „Abschließend geht es … um die Frage, ob künstliches Bewusstsein in Zukunft technisch möglich und sinnvoll ist. Im Zentrum stehen zukünftige Schlüsseltechnologien wie kollektive Intelligenz in Cyberphysical Systems, neue Rechnerstrukturen mit neuromorphen Computern und Quantencomputer.“ Das Buch ist Anfang November 2021 erschienen und kann über link.springer.com/book/10.1007/978-3-658-31114-8 bezogen werden.
Abb.: AAAI 2019 Spring Symposium an der Stanford University zu künstlichem Bewusstsein
Die 17. Internationale Architekturausstellung – die gesamte Reihe, einschließlich des Kunstteils, ist unter dem Namen La Biennale di Venezia bekannt – lief vom 22. Mai bis 21. November 2021. Der Salon Suisse wurde von der Architektin und Publizistin Evelyn Steiner kuratiert. Am 18. November 2021 fand die Veranstaltung „Jethro Knights, Armor Guyver, and Mutant X: How transhumanists challenge architecture“ statt. Prof. Dr. Oliver Bendel hielt einen Vortrag zum Thema „Human and animal enhancement in the context of architecture“, gefolgt von einer Diskussion mit Mike Schaffner (einem Schweizer Cyborg) und Prof. Dr. Georg Vrachliotis (einem Architekten der TU Delft). Zunächst klärte der Informations- und Maschinenethiker zentrale Begriffe wie „Human Enhancement“, „Animal Enhancement“, „Biohacking“, „Bodyhacking“, „Cyborg“ und „Transhumanismus“. Auch seine eigenen Begriffe „Robot Enhancement“ und „Reversed Cyborg“ bzw. „Inverted Cyborg“ brachte er ein. Dann präsentierte er Beispiele für Human Enhancement und Animal Enhancement, auch im Kontext der Architektur: Katzen mit Chip, die ins Haus gelangen, Menschen mit Chip, die das Smart Home zu Anpassungen bringen, Tiere und Menschen mit Chips und Sendern, die im Straßenverkehr rechtzeitig erkannt werden, und erweiterte und verbesserte Organismen, die auf fremden Planeten leben können. Zum Schluss stellte er ethische Überlegungen an. Er zeigte sich aufgeschlossen gegenüber der Idee des Cyborgs und kritisch gegenüber der Bewegung des Transhumanismus. Das Booklet zum Salon Suisse ist hier verfügbar.
Im November 2021 ist „Mensch. Maschine. Kommunikation“ (Hrsg. Sarah Brommer und Christa Dürscheid) im Narr-Verlag erschienen. Die beiden Herausgeberinnen führen in „Mensch-Mensch- und Mensch-Maschine-Kommunikation“ in die Thematik ein. Im Teil „Mensch-Mensch-Kommunikation via Maschine“ stammen die Beiträge von Linda Bosshart („WhatsApp, iMessage und E-Mail“), Roberto Tanchis und Leonie Walder („Animojis“), Mia Jenni („Die weinende, virtuelle Influencerin“) und Florina Zülli („‚Neuer Partner‘ in den Warenkorb hinzufügen?“). Der Teil „Mensch-Maschine-Kommunikation I: Kommunikation mit Robotern“ wird bestritten von Ilona Straub („Die Mensch-Roboter-Interaktion“), Jana Seebass („Roboter als Partnerersatz“), Rahel Staubli („Vertrauen in Lio und Co.“) und Andrea Knoepfli („Mit welchen Strategien erzeugen Pflegeroboter Vertrauen?“). Der Teil „Mensch-Maschine-Kommunikation II: Kommunikation mit Assistenzsystemen“ gehört Julia Degelo („Der wütende Mann, die höfliche Frau – und die Frage nach dem Dazwischen“) sowie Ann Fuchs und Zora Naef („Smart Homes im öffentlichen Diskurs“). Abgeschlossen wird das Buch (Teil „Exkurs: Mensch. Maschine. Menschmaschine“) von Oliver Bendel mit seinem Beitrag „Chips, Devices, and Machines within Humans“. Er geht auf „Bodyhacking as Movement, Enhancement, and Adaptation“ ein. Die Publikation kann hier kostenlos heruntergeladen werden.
Abb.: Installation in der Hauptausstellung der Biennale 2021
Das Buch „Soziale Roboter“ (Hrsg. Oliver Bendel) ist am 4. November 2021 bei Springer Gabler erschienen. Es besteht aus fünf Teilen: „Grundlagen, -begriffe und -fragen“, „Soziale Robotik und andere Disziplinen“, „Gestaltung, Interaktion und Kommunikation“, „Anwendungsbereiche sozialer Roboter“ und „Die Zukunft sozialer Roboter“. Es sind, das Vorwort mitgezählt, 30 Beiträge, mit ca. 35 Abbildungen, bei ca. 570 Seiten. Der Untertitel lautet: „Technikwissenschaftliche, wirtschaftswissenschaftliche, philosophische, psychologische und soziologische Grundlagen“. Mit dabei sind führende Expertinnen und Experten der Sozialen Robotik, der Robotik, der Künstlichen Intelligenz, der Soziologie, der Psychologie und der Philosophie. Sie lehren und forschen an Hochschulen in der Schweiz, in Deutschland, in Österreich, in Dänemark und in Schweden. Auch ein Hersteller ist vertreten, der über den Einsatz seines Produkts berichtet. Die einzelnen Kapitel können im PDF- oder HMTL-Format über SpringerLink heruntergeladen werden. In Kürze stehen Gesamt-PDF und Printversion zur Verfügung.
PostAuto ist für seine innovativen Projekte mit automatischen und autonomen Geräten und Fahrzeugen bekannt. So verkehrte im Wallis früh das SmartShuttle. Nun kommt ein Transportroboter hinzu, der in diesem Zusammenhang auch als Gepäckroboter bezeichnet werden kann. In einer Medienmitteilung stellt das Schweizer Unternehmen das bekannte Problem dar, dass man als Tourist in autofreien Städten oft schwer schleppen muss, bis man bei der entsprechenden Destination angekommen ist. „Die Lösung ist ein intelligenter, selbstfahrender Roboter namens Robi, der nun in einem Pilotprojekt getestet wird. Der Roboter holt die Kundinnen und Kunden an der öV-Haltestelle oder bei der Unterkunft ab und folgt ihnen auf Schritt und Tritt bis zum Zielort. Die Kunden müssen beim Start nur ihr Gepäck auf den Roboter laden. Am Ziel nehmen sie ihre Koffer wieder zu sich, und Robi ist bereit für die nächste Fahrt.“ (Medienmitteilung PostAuto, 22. Oktober 2021) Dies erinnert an das Projekt von Piaggo, nur dass Robi wesentlich größer und vermutlich praxistauglicher ist. Wer ihn kennenlernen und sich von ihm unterstützen lassen will, muss nach Saas-Fee reisen, am besten mit Bahn und Bus.
M94.5 ist ein Radiosender, der von der Media School Bayern betrieben wird. Partner sind max neo, LMU und Süddeutsche Zeitung. „Hashtag“ nennt sich das „Online-Magazin rund ums Netz“. Am 12. September 2021 wurde die Sendung „Roboterethik, Videospielabhängigkeit und unsere Gaming-Sommerhits“ ausgestrahlt. Beteiligt waren Tabea Wolf und Moritz Braun, die Moderation oblag Moritz Braun. Im ersten Teil geht es u.a. um Elon Musks Idee des Optimus, eines humanoiden Roboters, der einst – so das Manager Magazin – gefährliche, sich wiederholende oder langweilige Aufgaben übernehmen könnte. Zu Wort kommt Prof. Dr. Oliver Bendel, der sich als Informations-, Roboter- und Maschinenethiker mit sozialen Robotern und Servicerobotern beschäftigt. Er ist der Meinung, dass Optimus zunächst eben einfach eine Idee ist. Es ist kein Roboter in Sicht, der von der Wohnung im dritten Stock über das Treppenhaus nach unten springt, auf dem Gehweg hunderten Passanten und Hunden (samt Haufen) sowie Skatern und Scootern ausweicht, einen Einkaufswagen mit einer Münze freibekommt, den Supermarkt durch die Schiebe- oder Drehtür betritt und sich an den Regalen so bedient, dass diese danach nicht zerstört sind. Die Sendung kann über www.m945.de bis zum 19. September nachgehört werden.
Wie kann man aus einfachen, weichen Formen und Objekten soziale Roboter machen, also Roboter für den Umgang mit Menschen und Tieren? Dieser Frage sind unter der Betreuung von Prof. Dr. Oliver Bendel die vietnamesische Studentin Nhi Hoang Yen Tran und ihr Kommilitone Thang Vu Hoang im Projekt „Simple, Soft Social Robots“ an der Hochschule für Wirtschaft FHNW nachgegangen. Als Grundlage für ihre Überlegungen haben sie Hugvie aus den Hiroshi Ishiguro Laboratories verwendet – diese Labs sind vor allem berühmt für den Geminoid und für Erica. Aber auch Umarmungsroboter wie Telenoid stammen von ihnen. Das jüngste Produkt aus dieser Reihe ist eben Hugvie. An seinem Kopf ist eine Tasche für ein Smartphone angebracht. Voneinander weit entfernte Personen können miteinander sprechen und dabei das Gefühl haben, sich gegenseitig zu umarmen und zu spüren. Aber was kann man mit Hugvie und ähnlichen Formen noch tun? Elf Vorschläge haben die beiden Studenten erarbeitet. Ein Video erklärt fünf von ihnen. Zwei davon sind Varianten von Hugvie.
Simple, soft shapes are everywhere. In our home environment you can find pillows, blankets, balls, bottles, clothes, etc. Robots are often expensive and complex. But couldn’t they be thought of in a completely different way? How could social robots emerge from simple, soft shapes? As part of their final thesis at the School of Business FHNW, Nhi Tran Hoang Yen and Thang Hoang Vu from Ho Chi Minh City have answered this question posed by their supervisor Prof. Dr. Oliver Bendel. They have submitted eleven proposals for novel robots. All are shown on informationsethik.net. The eleventh proposal is Rish (go here to the previous). Rish moves like a fish and looks similar to a fish. Thus, it fits well into the community of aquarium animals. Its main purpose is to clean the aquarium from waste and excrement. The authors write in their documentation: „It is recommended to equip a thin, stretchable, and robust ultimate sensor to either detecting the waste or reconfiguring the moving body shapes and tasks of Rish.“ Two books by Oliver Bendel on social robots – „300 Keywords Soziale Robotik“ and „Soziale Roboter“ – will be published in October 2021.
Fig.: Rish (image: Trần Hoàng Yến Nhi & Hoàng Vũ Thắng, Thành phố Hồ Chí Minh, Việt Nam)
Simple, soft shapes are everywhere. In our home environment you can find pillows, blankets, balls, bottles, clothes, etc. Robots are often expensive and complex. But couldn’t they be thought of in a completely different way? How could social robots emerge from simple, soft shapes? As part of their final thesis at the School of Business FHNW, Nhi Tran Hoang Yen and Thang Hoang Vu from Ho Chi Minh City have answered this question posed by their supervisor Prof. Oliver Bendel. They have submitted eleven proposals for novel robots. All are shown on informationsethik.net. The tenth proposal is Sleeping Hugvie (go here to the previous). The normal Hugvie is used to communicate with distant people, giving the feeling of sensing them. You talk to them and hug the robot. In the process, you apparently feel the other person’s heartbeat via the integrated element. The Sleeping Hugvie has a different function. It is supposed to make it easier for babies to fall asleep. Its shape can be adjusted. The integrated element can also simulate the heartbeat – of the mother, for example. Parents can talk to the child or play soothing music (or white noise) via a speaker. A camera for observing the child is optional. Two books by Oliver Bendel on social robots – „300 Keywords Soziale Robotik“ and „Soziale Roboter“ – will be published in October 2021.
Fig.: Sleeping Hugvie (image: Trần Hoàng Yến Nhi & Hoàng Vũ Thắng, Thành phố Hồ Chí Minh, Việt Nam)
How do social robots emerge from simple, soft shapes? As part of their final thesis at the School of Business FHNW, Nhi Tran Hoang Yen and Thang Hoang Vu from Ho Chi Minh City have answered this question posed by their supervisor Prof. Oliver Bendel. They have submitted eleven proposals for novel robots. All are shown on informationsethik.net. The ninth proposal is RoofBot (go here to the previous). RoofBot was inspired by FLORABORG. FLORABORG is a concept for a plant cyborg from 2015 by Oliver Bendel. RoofBot detects via sensors if there is too much or too little sun and if it is too hot or too cold. When it detects that the plants are thirsty, it gives them water. It can also provide them with shade via a flexible roof. RoofBot, unlike the other proposals, is not necessarily a good example of simple, soft social robots, but it is an interesting variant of FLORABORG, which leaves the plant itself untouched. Two books by Oliver Bendel on social robots – „300 Keywords Soziale Robotik“ and „Soziale Roboter“ – will be published in October 2021.
Fig.: RoofBot (image: Trần Hoàng Yến Nhi & Hoàng Vũ Thắng, Thành phố Hồ Chí Minh, Việt Nam)
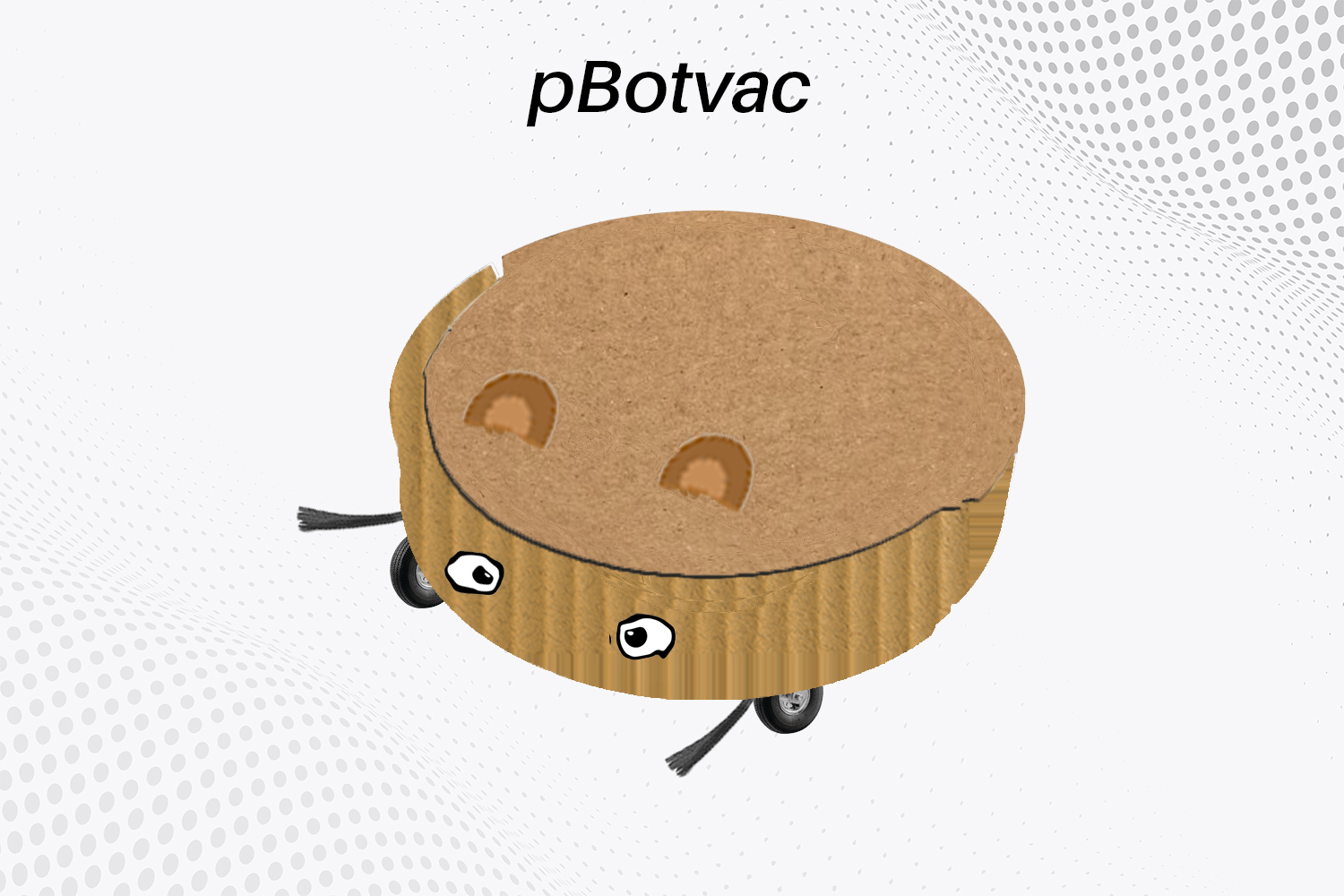
How do social robots emerge from simple, soft shapes? As part of their final thesis at the School of Business FHNW, Nhi Tran Hoang Yen and Thang Hoang Vu from Ho Chi Minh City have answered this question posed by their supervisor Prof. Dr. Oliver Bendel. They have submitted eleven proposals for novel robots. All are shown on informationsethik.net. The eighth proposal is PBotvac (go here to the previous). In the near future, two or three service robots will be found in many households. Children should understand from the beginning what the possibilities and limitations are. It may help them to have a toy that provides basic functions, but is very simple and harmless – and cheap. One such toy is PBotvac. It is essentially made of cardboard. With it, children learn the purpose of a robot vacuum cleaner and to handle it in an appropriate manner. Two books by Oliver Bendel on social robots – „300 Keywords Soziale Robotik“ and „Soziale Roboter“ – will be published in October 2021.
Fig.: PBotvac (image: Trần Hoàng Yến Nhi & Hoàng Vũ Thắng, Thành phố Hồ Chí Minh, Việt Nam)
Elon Musk präsentierte beim „AI Day“ von Tesla die Idee eines humanoiden Roboters, der einst – so das Manager Magazin – gefährliche, sich wiederholende oder langweilige Aufgaben übernehmen könnte. Der Tesla-Bot mit dem Namen Optimus „werde rund fünf Fuß acht Zoll (knapp 1,73 Meter) hoch sein, 57 Kilogramm wiegen und zahlreiche Jobs erledigen können, vom Anbringen von Schrauben an Autos bis zur Abholung von Einkäufen im Laden“. Er „werde mit acht Kameras und einem vollwertigen selbstfahrenden Computer ausgestattet sein und die gleichen Werkzeuge nutzen, die Tesla im Auto verwende“ (Manager Magazin, 20. August 2021). Laut der Ankündigung des Unternehmens aus dem Silicon Valley soll der Roboter also physische Arbeiten übernehmen können. Genau damit tun sich Serviceroboter aber im Moment schwer, vor allem humanoide Modelle. Die Visualisierung lässt kaum Rückschlüsse auf die Fähigkeiten des Prototyps zu, der bereits 2022 vorliegen soll. Auf einem großen Display im Kopfbereich könnten Augen und Mund erscheinen und mimische Fähigkeiten umgesetzt werden. Wenn es – wie im Video zu sehen – ausgeschaltet ist, wirkt der Roboter unheimlich und unnahbar. Arme und Füße dürften in dieser Form kaum geeignet sein, den Körper zu tragen. Auch Gelenke sind nur ansatzweise zu erkennen. Insgesamt ist unklar, warum ausgerechnet Tesla die Lücken schließen sollte, die bei Sony, SoftBank und Boston Dynamics auch nach vielen Jahren noch vorhanden sind. Es ist kein Roboter in Sicht, der von der Wohnung im dritten Stock über das Treppenhaus nach unten springt, auf dem Gehweg hunderten Passanten und Hunden (samt Haufen) sowie Skatern und Scootern ausweicht, einen Einkaufswagen mit einer Münze freibekommt, den Supermarkt durch die Schiebe- oder Drehtür betritt und sich an den Regalen so bedient, dass diese danach nicht zerstört sind. Vielleicht soll der Tesla-Bot aber auch nur eine Ergänzung des Tesla-Autos der Zukunft sein und in einem Drive-in eine Pizza und eine Cola holen. Ein Auto mit Armen, eine Idee übrigens, die Oliver Bendel und Frank M. Rinderknecht am Rande eines von SIX moderierten Gesprächs im Jahre 2016 diskutierten.
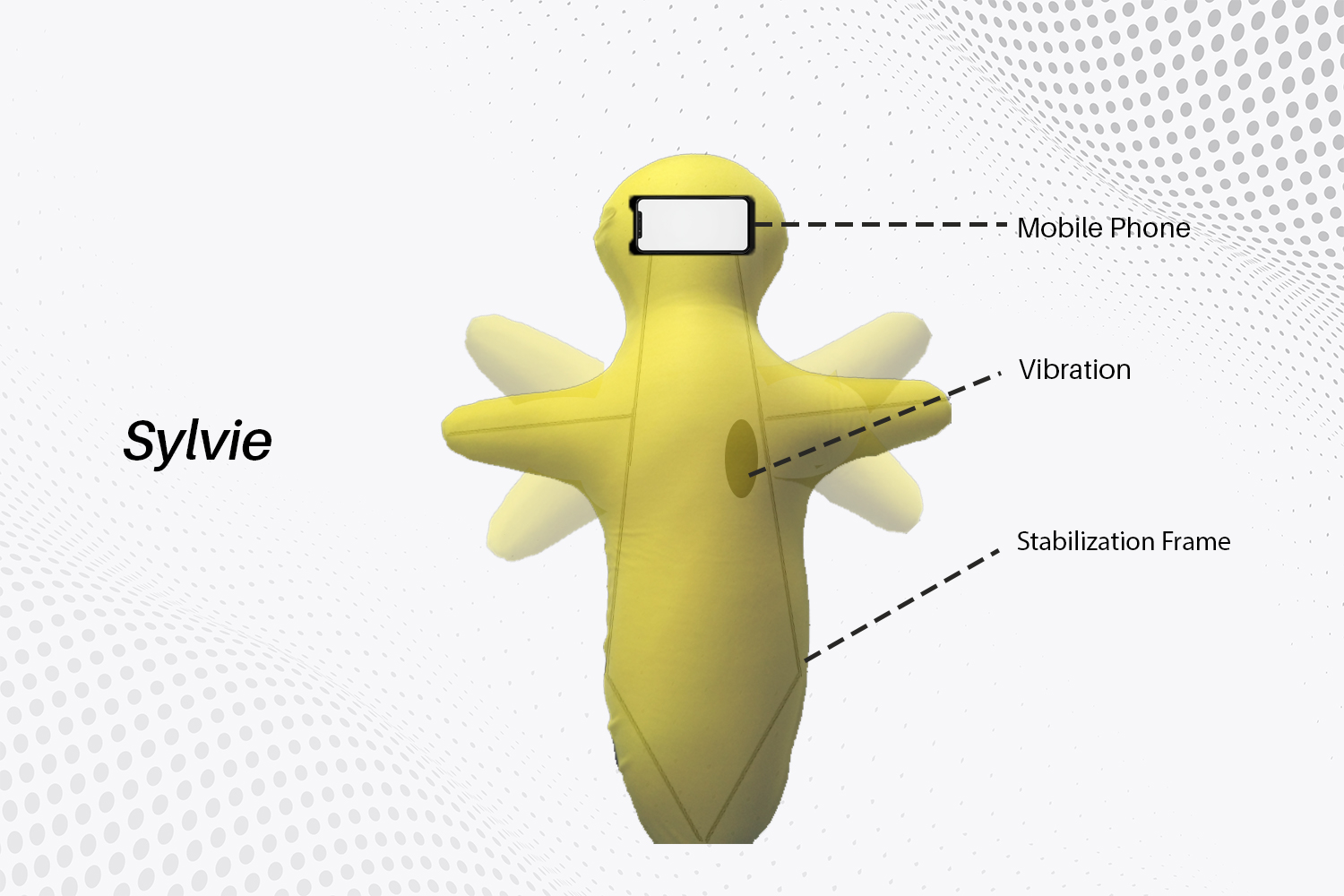
Simple, soft shapes are everywhere. In our home environment you can find pillows, blankets, balls, bottles, clothes, etc. Robots are often expensive and complex. But couldn’t they be thought of in a completely different way? How could social robots emerge from simple, soft shapes? As part of their final thesis at the School of Business FHNW, Nhi Tran Hoang Yen and Thang Hoang Vu from Ho Chi Minh City have answered this question posed by their supervisor Prof. Dr. Oliver Bendel. They have submitted eleven proposals for novel robots. All are shown on informationsethik.net. The seventh proposal is Sylvie (go here to the previous). The normal Hugvie is a communication and hugging device, whereby the communication is not with it, but with friends, partners and family members. Sylvie is a variant of it. You talk directly to her, and when you hug her, you mean her, not a human being. And there’s another difference: while in the classic Hugvie the smartphone is invisibly housed in a pocket on the head, in Sylvie it forms part of the face. Two books by Oliver Bendel on social robots – „300 Keywords Soziale Robotik“ and „Soziale Roboter“ – will be published in October 2021.
Fig.: Sylvie (image: Trần Hoàng Yến Nhi & Hoàng Vũ Thắng, with an addition by Oliver Bendel)
The Dagstuhl seminar „Conversational Agent as Trustworthy Autonomous System (Trust-CA)“ will take place from September 19 – 24, 2021. According to the website, Schloss Dagstuhl – Leibniz-Zentrum für Informatik „pursues its mission of furthering world class research in computer science by facilitating communication and interaction between researchers“. Organizers of this event are Asbjørn Følstad (SINTEF – Oslo), Jonathan Grudin (Microsoft – Redmond), Effie Lai-Chong Law (University of Leicester) and Björn Schuller (University of Augsburg). They outline the background as follows: „CA, like many other AI/ML-infused autonomous systems, need to gain the trust of their users in order to be deployed effectively. Nevertheless, in the first place, we need to ensure that such systems are trustworthy. Persuading users to trust a non-trustworthy CA is grossly unethical. Conversely, failing to convince users to trust a trustworthy CA that is beneficial to their wellbeing can be detrimental, given that a lack of trust leads to low adoption or total rejection of a system. A deep understanding of how trust is initially built and evolved in human-human interaction (HHI) can shed light on the trust journey in human-automation interaction (HAI). This calls forth a multidisciplinary analytical framework, which is lacking but much needed for informing the design of trustworthy autonomous systems like CA.“ (Website Dagstuhl) Regarding the goal of the workshop, the organizers write: „The overall goal of this Dagstuhl Seminar is to bring together researchers and practitioners, who are currently engaged in diverse communities related to Conversational Agent (CA) to explore the three main challenges on maximising the trustworthiness of and trust in CA as AI/ML-driven autonomous systems – an issue deemed increasingly significant given the widespread uses of CA in every sector of life – and to chart a roadmap for the future research on CA.” (Website Dagstuhl) Oliver Bendel (School of Business FHNW) will talk about his chatbot and voice assistant projects. These emerge since 2013 from machine ethics and social robotics. Further information is available here (photo: Schloss Dagstuhl).
Fig.: Bird’s eye view of Schloss Dagstuhl (Photo: Schloss Dagstuhl)
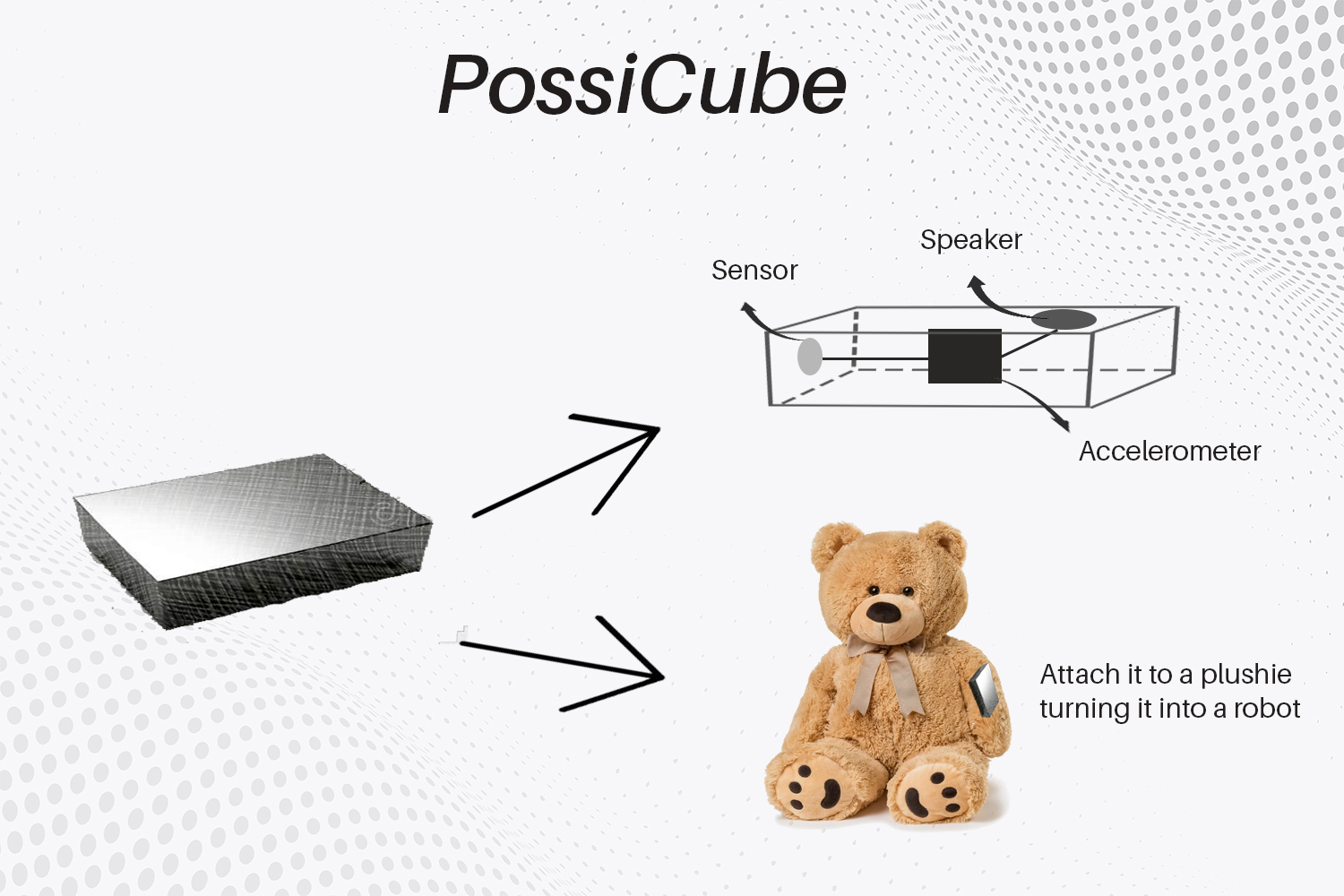
Simple, soft shapes are everywhere. In our home environment you can find pillows, blankets, balls, bottles, clothes, etc. Robots are often expensive and complex. But couldn’t they be thought of in a completely different way? How could social robots emerge from simple, soft shapes? As part of their final thesis at the School of Business FHNW, Nhi Tran Hoang Yen and Thang Hoang Vu from Ho Chi Minh City have answered this question posed by their supervisor Prof. Dr. Oliver Bendel. They have submitted eleven proposals for novel robots. All are shown on informationsethik.net. The sixth proposal is PossiCube, the cube of possibilities (go here to the previous). Possicube is an element that can be integrated into any simple soft shape. It transforms them into a simple social robot. For example, thanks to PossiCube, a teddy bear can perceive its environment and react to it with sounds or sentences. It would be ideal to be able to select different categories with different models. This would make it possible to robotize things in a simple and appropriate way. Two books by Oliver Bendel on social robots – „300 Keywords Soziale Robotik“ and „Soziale Roboter“ – will be published in October 2021.
Fig.: Possicube (image: Trần Hoàng Yến Nhi & Hoàng Vũ Thắng, Thành phố Hồ Chí Minh, Việt Nam)
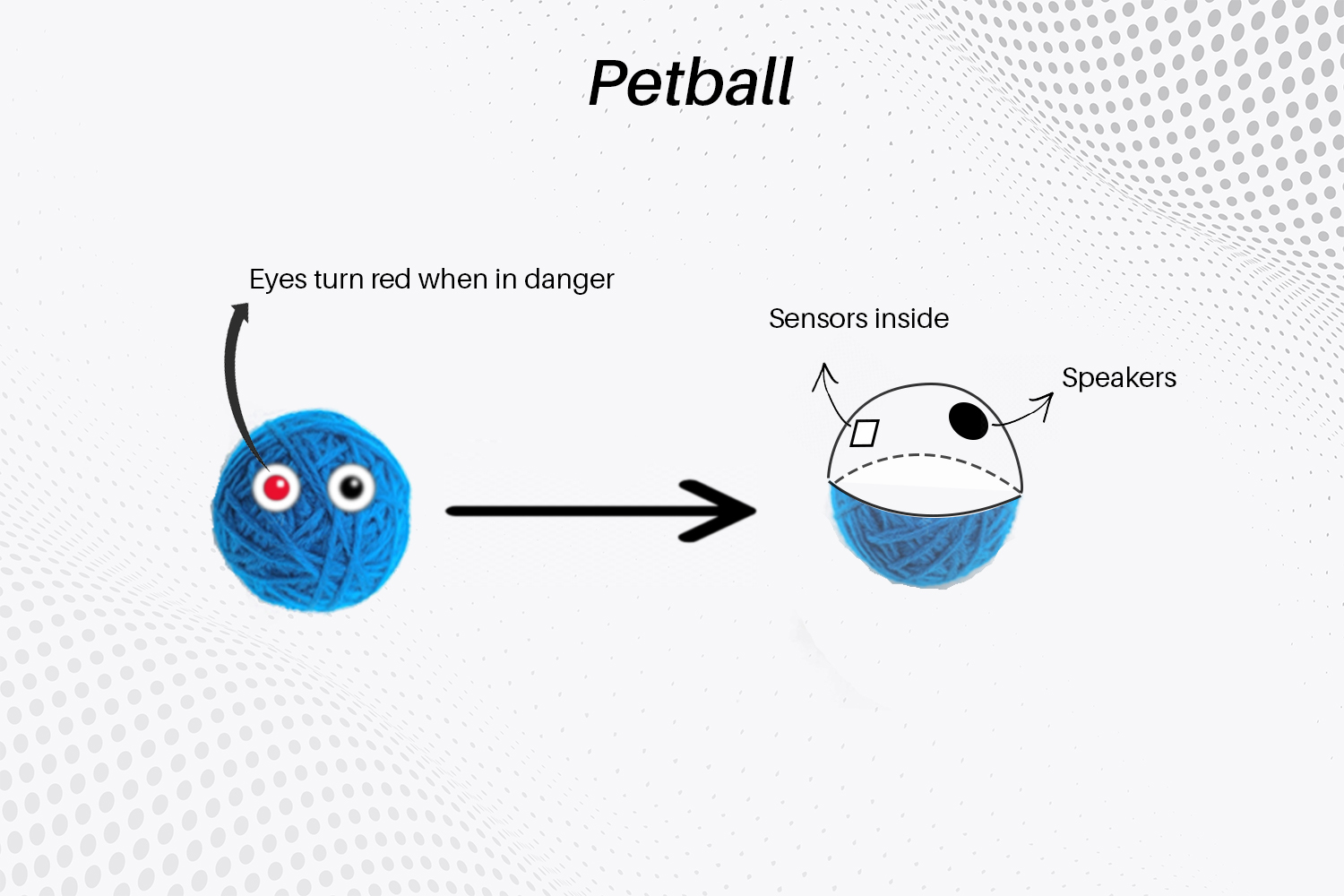
Simple, soft shapes are everywhere. In our home environment are pillows, blankets, balls, bottles, clothes, etc. Robots are often expensive and complex. But couldn’t they be thought of in a completely different way? How could social robots emerge from simple, soft shapes? As part of their final thesis at the School of Business FHNW, Nhi Tran Hoang Yen and Thang Hoang Vu from Ho Chi Minh City have answered this question posed by their supervisor Prof. Dr. Oliver Bendel. They have submitted eleven proposals for novel robots. All are shown on informationsethik.net. The fifth proposal is Petball, a play ball for pets, especially dogs and cats (go here to the previous). It entertains them and keeps them moving. It can detect if an animal strays too far from the house and sound the alarm if necessary. Two books by Oliver Bendel on social robots – „300 Keywords Soziale Robotik“ and „Soziale Roboter“ – will be published in October 2021.
Fig.: Petball (image: Trần Hoàng Yến Nhi & Hoàng Vũ Thắng, Thành phố Hồ Chí Minh, Việt Nam)
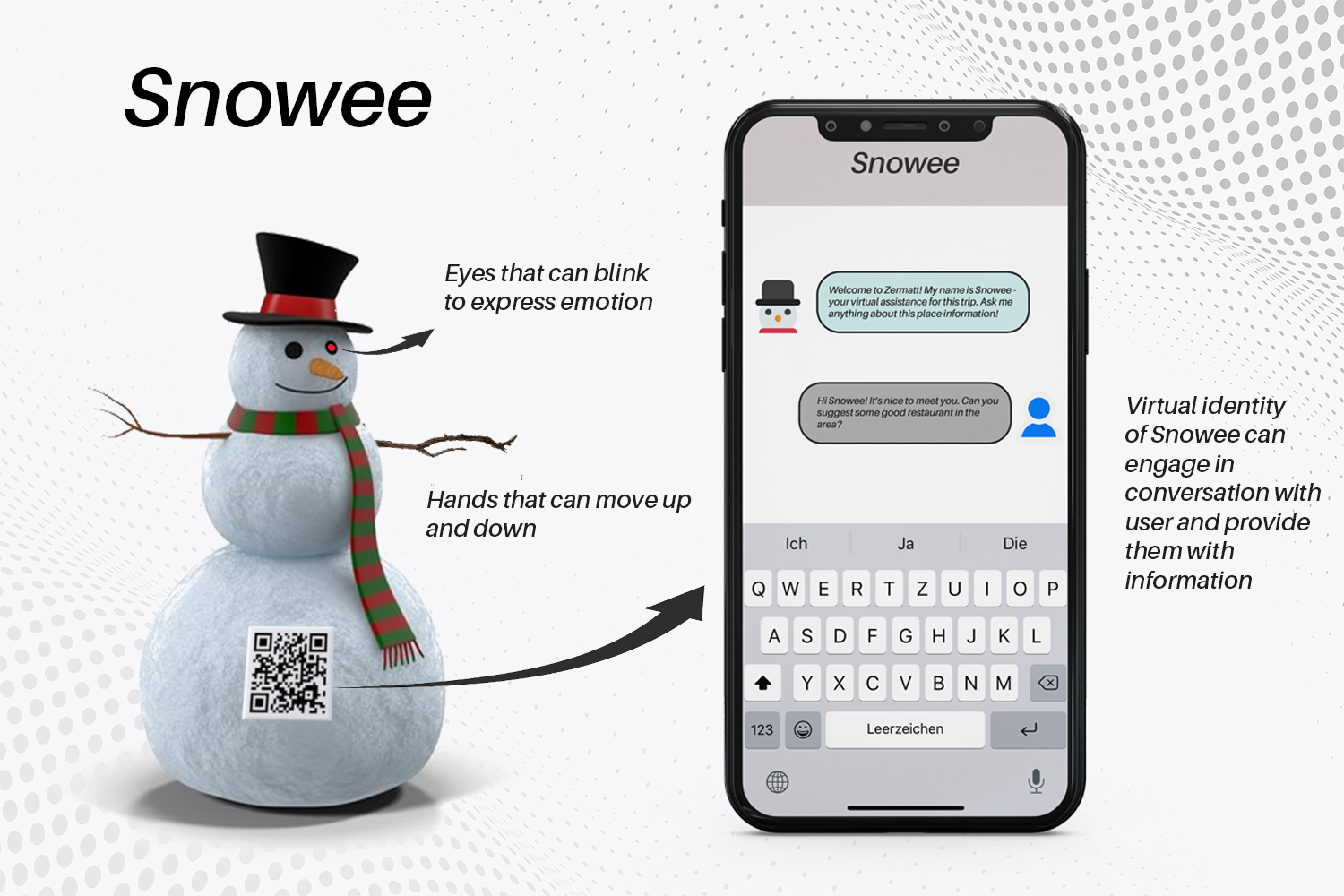
How do social robots emerge from simple, soft shapes? As part of their final thesis at the School of Business FHNW, Nhi Tran Hoang Yen and Thang Hoang Vu from Ho Chi Minh City have answered this question posed by their supervisor Prof. Dr. Oliver Bendel. They have submitted eleven proposals for novel robots. All are shown on informationsethik.net. The fourth proposal is Snowee, a very cold robot that is created from a snowman (go here to the previous). In principle, a normal snowman is enough when the temperatures are low for a long time. The elements are integrated into the appropriate areas. When the snowman melts, they sometime lie on the ground and can be taken away. However, it is also possible to build a snowman with a framework that contributes to stability and holds the components in place. For example, Snowee can be placed in front of a hotel in Arosa or Davos to greet guests – with the blinking of its eyes, with arm movements and via its avatar on the smartphone – and inform them about the amenities of the facility and recreational opportunities. Two books by Oliver Bendel on social robots – „300 Keywords Soziale Robotik“ and „Soziale Roboter“ – will be published in October 2021.
Fig.: Snowee (image: Trần Hoàng Yến Nhi & Hoàng Vũ Thắng, Thành phố Hồ Chí Minh, Việt Nam)
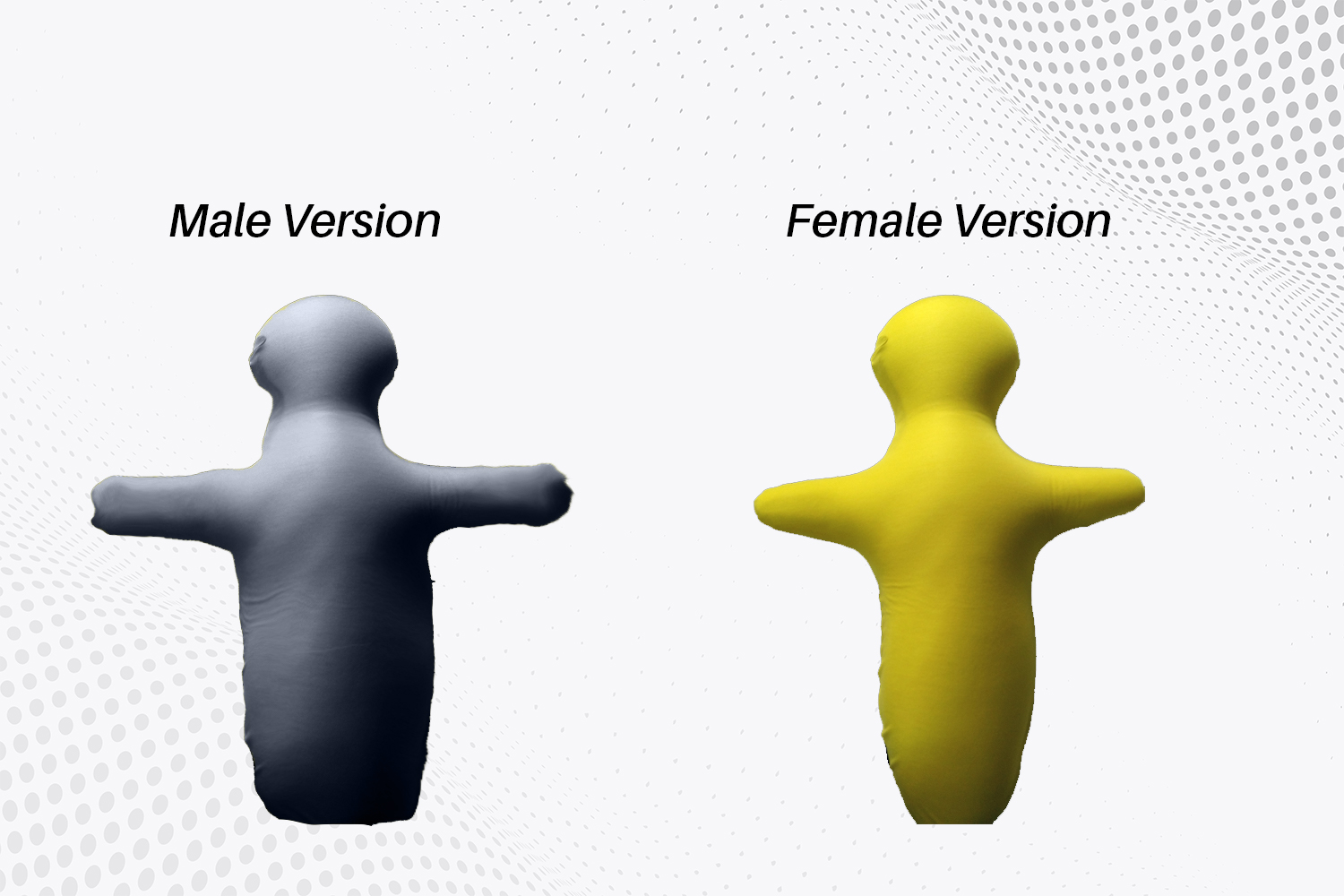
How do social robots emerge from simple, soft shapes? As part of their final thesis at the School of Business FHNW, Nhi Tran Hoang Yen and Thang Hoang Vu from Ho Chi Minh City have answered this question posed by their supervisor Prof. Dr. Oliver Bendel. They have submitted eleven proposals for novel robots. All are shown on informationsethik.net. The third proposal is a variant of Hugvie, Ishiguro’s communication and hugging robot (go here to the previous). A pocket for a smartphone is attached to its head. People who are far away from each other can talk to each other and have the feeling of hugging and feeling each other. Hugvie has more feminine forms at the moment. At least this was the impression of the two students. But what if the human counterpart, who is far away, is a boy or a man? Then perhaps male forms would be more appropriate. The two students have called the possibility of gender variants of the communication and hugging robot „Gendering Hugvie“. Two books by Oliver Bendel on social robots – „300 Keywords Soziale Robotik“ and „Soziale Roboter“ – will be published in October 2021.
Fig.: Gendering Hugvie (image: Trần Hoàng Yến Nhi & Hoàng Vũ Thắng, Thành phố Hồ Chí Minh, Việt Nam)
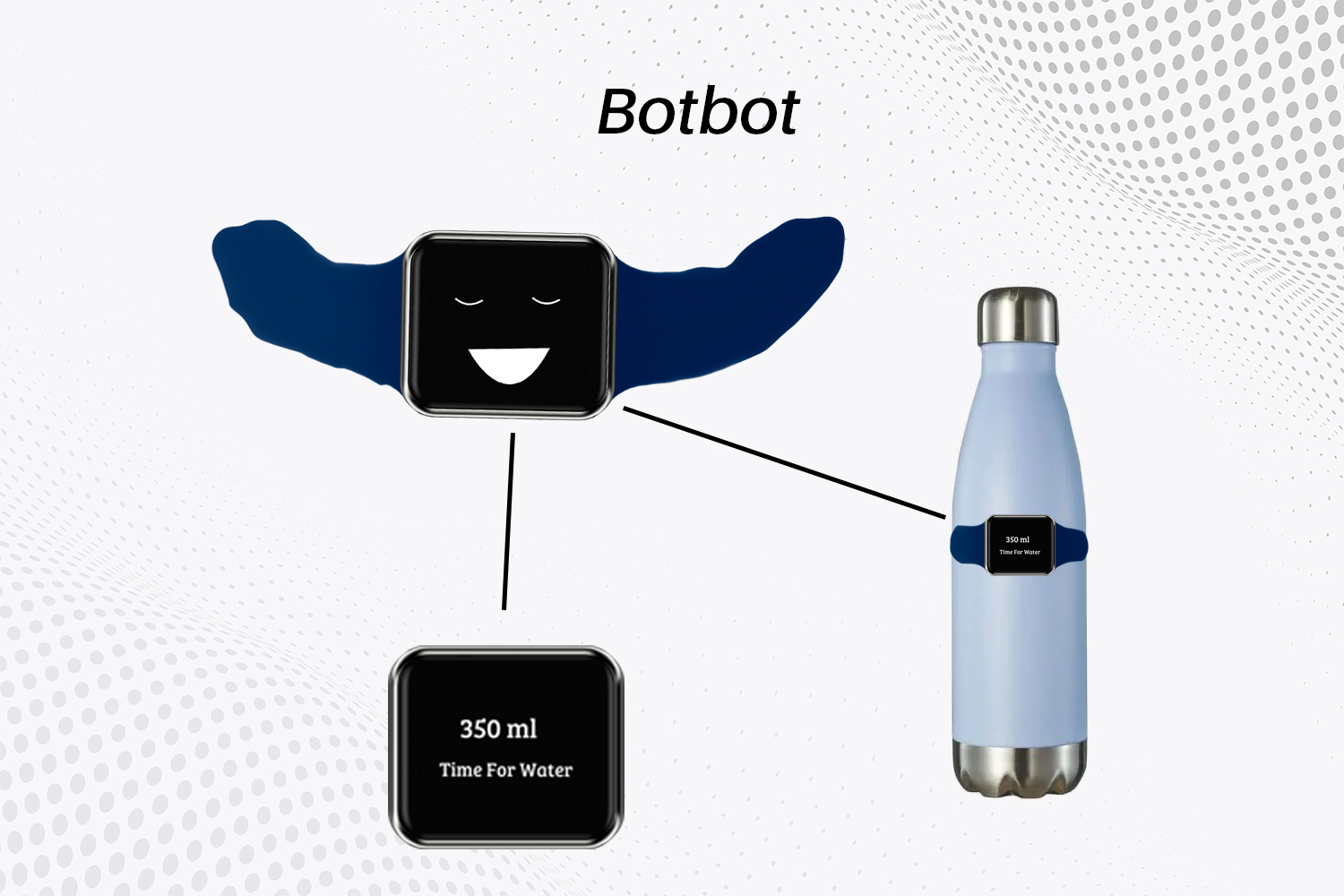
How do social robots emerge from simple, soft shapes? As part of their final thesis at the School of Business FHNW, Nhi Tran Hoang Yen and Thang Hoang Vu from Ho Chi Minh City have answered this question posed by their supervisor Prof. Dr. Oliver Bendel. They have submitted eleven proposals for novel robots. All are shown on informationsethik.net. The second proposal is a kind of clock (go here to the previous), which is placed around the neck of a bottle (at least a PET bottle would be a simple, soft form). Botbot, as it is called (from „bottle“ and „robot“), reminds the user to drink something. The robot can determine how much is left in the bottle and how much one has already drunk. Botbot can output text and has simple miming capabilities. On the one hand, one can be bothered by the pedagogical function. On the other hand, this function could prove to be really useful. The fact is that many people drink too little and get sick as a result. Two books by Oliver Bendel on social robots – „300 Keywords Soziale Robotik“ and „Soziale Roboter“ – will be published in October 2021.
Fig.: Botbot (image: Trần Hoàng Yến Nhi & Hoàng Vũ Thắng, Thành phố Hồ Chí Minh, Việt Nam)
How do social robots emerge from simple, soft shapes? As part of their final thesis at the School of Business FHNW, 23-year-old students Nhi Tran Hoang Yen and Thang Hoang Vu from Ho Chi Minh City (Vietnam) have answered this question posed by their supervisor Prof. Dr. Oliver Bendel. They have submitted eleven proposals for novel robots. All are shown on informationsethik.net. The first is a pillow to which a tail has been added. Its name is Petanion. The tail could move like the tail of a cat or dog. In addition, the pillow could make certain sounds. It would be optimal if the tail movements were based on the behavior of the user. Thus, as desired, a social robot is created from a simple, soft form, in this case a pet substitute. Petanion is soft and cute and survives a long time. It can also be used if one has certain allergies or if there is not enough space or money in a household for a pet. Last but not least, the ecological balance is probably better – above all, the robot does not eat animals that come from factory farming. The inspiration may have been Qoobo, a pillow with a tail, designed to calm and to „heal the heart“. Two books by Oliver Bendel on social robots – „300 Keywords Soziale Robotik“ and „Soziale Roboter“ – will be published in October 2021.
Fig.: Petanion (image: Trần Hoàng Yến Nhi & Hoàng Vũ Thắng, Thành phố Hồ Chí Minh, Việt Nam)
In seiner aktuellen Ausgabe vom 13. August 2021 bringt der Beobachter zwei Seiten zu Rasenmährobotern. Eine zentrale Rolle spielen in dem Artikel von Tina Berg die tierfreundlichen Maschinen, die an der Hochschule für Wirtschaft FHNW unter der Leitung von Prof. Dr. Oliver Bendel entwickelt werden. Bereits 2014 entstand der Entwurf zu LADYBIRD, einem Saugroboter, der Marienkäfer erkennen und für sie seine Arbeit einstellen sollte. 2017 wurde der Prototyp in einfacher Form umgesetzt. Das Buch „Grundfragen der Maschinenethik“ von Catrin Misselhorn aus dem Reclam-Verlag – sie lieferte auch für das „Handbuch Maschinenethik“ aus dem Springer-Verlag zwei herausragende Beiträge – steigt mit dem bekannten Beispiel ein. Wesentlich weiter ging HAPPY HEDGEHOG, der Prototyp eines igelfreundlichen Rasenmähroboter aus dem Jahre 2019/2020, der anders als konventionelle Geräte die kleinen, stachligen Geschöpfe verschont. Er wird in dem Artikel „Maschinen mit Moral“ erwähnt (das Problem wird bereits auf dem Cover genannt) – und auch andere Expertinnen und Experten, die zu Wort kommen, sind der Ansicht, dass es solche moralischen Maschinen braucht. Dabei spielt keine Rolle, dass diese kein Bewusstsein, keinen freien Willen etc. haben – sie sollen einfach Regeln folgen, die man ihnen einpflanzt, und diese Regeln können auch moralischer Art sein. HAPPY HEDGEHOG wurde zuletzt bei den AAAI Spring Symposia im März 2021 präsentiert. Das Paper kann hier aufgerufen werden. Der gedruckte Beobachter ist an jedem Kiosk in der Schweiz erhältlich. Eine Onlineversion steht ebenfalls bereit, wobei der Titel des Artikels darin in Anspielung auf die konventionellen Roboter „Maschinen ohne Moral“ lautet.






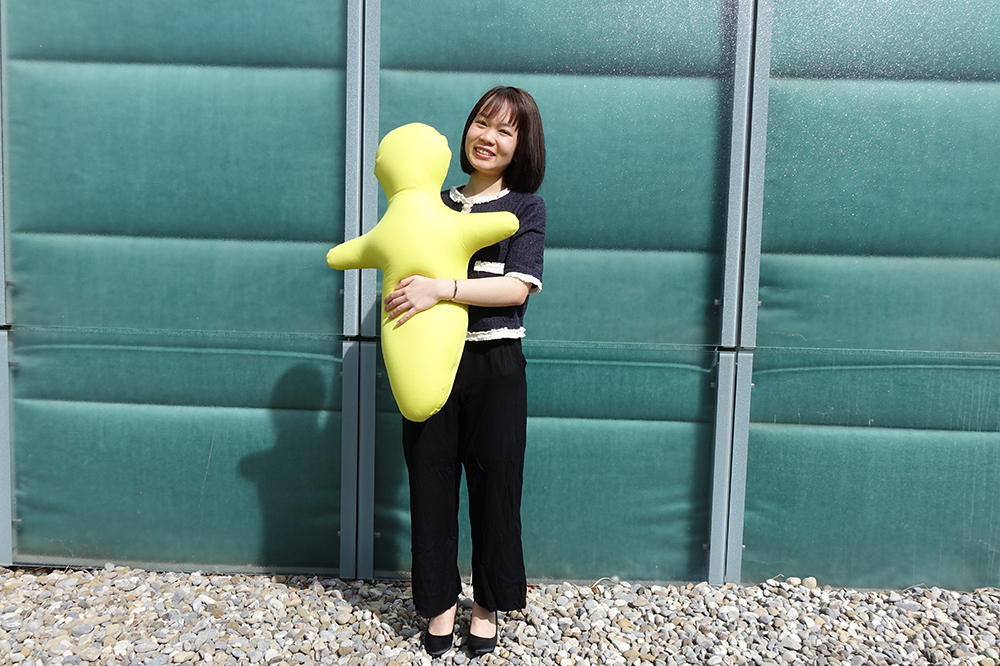
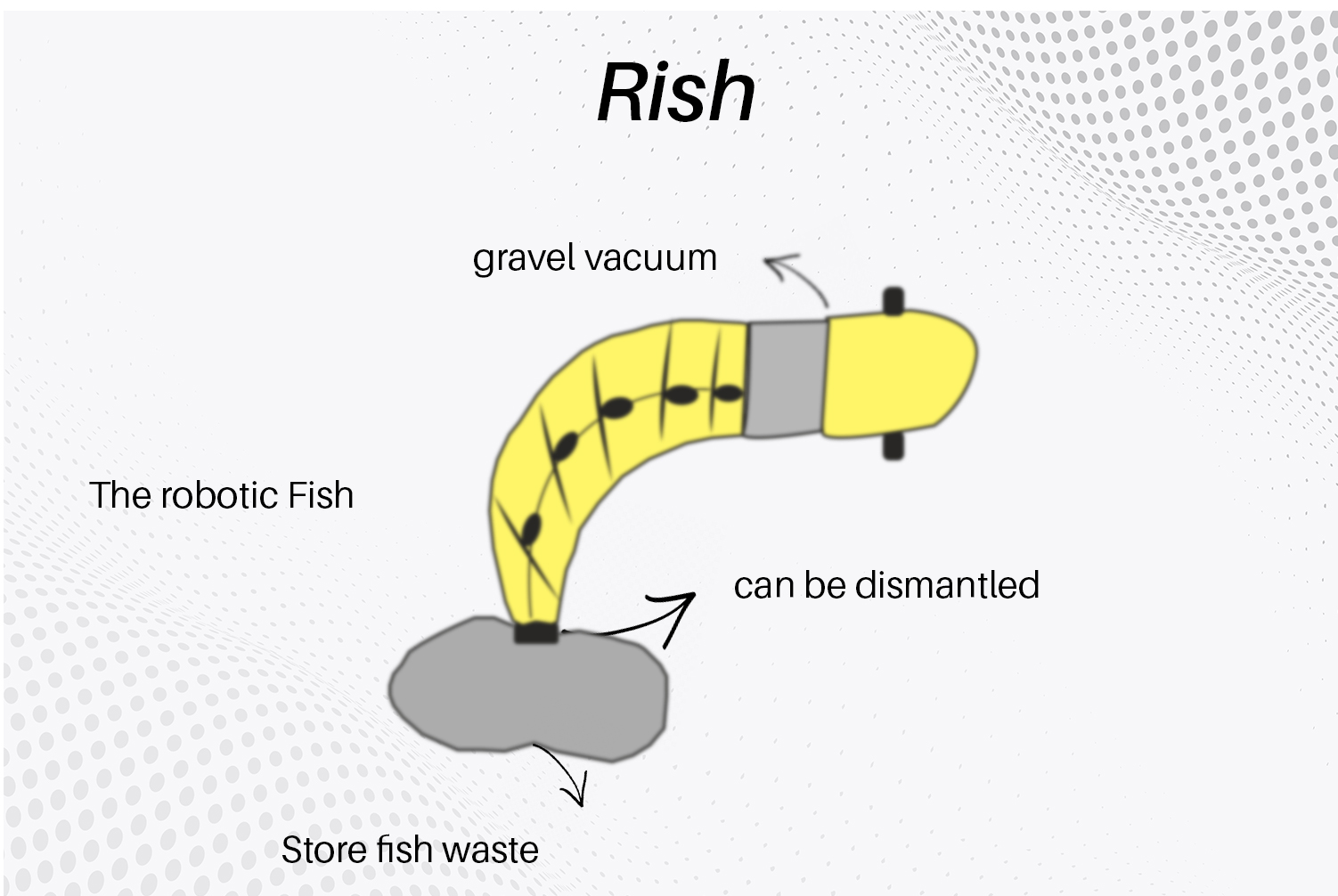
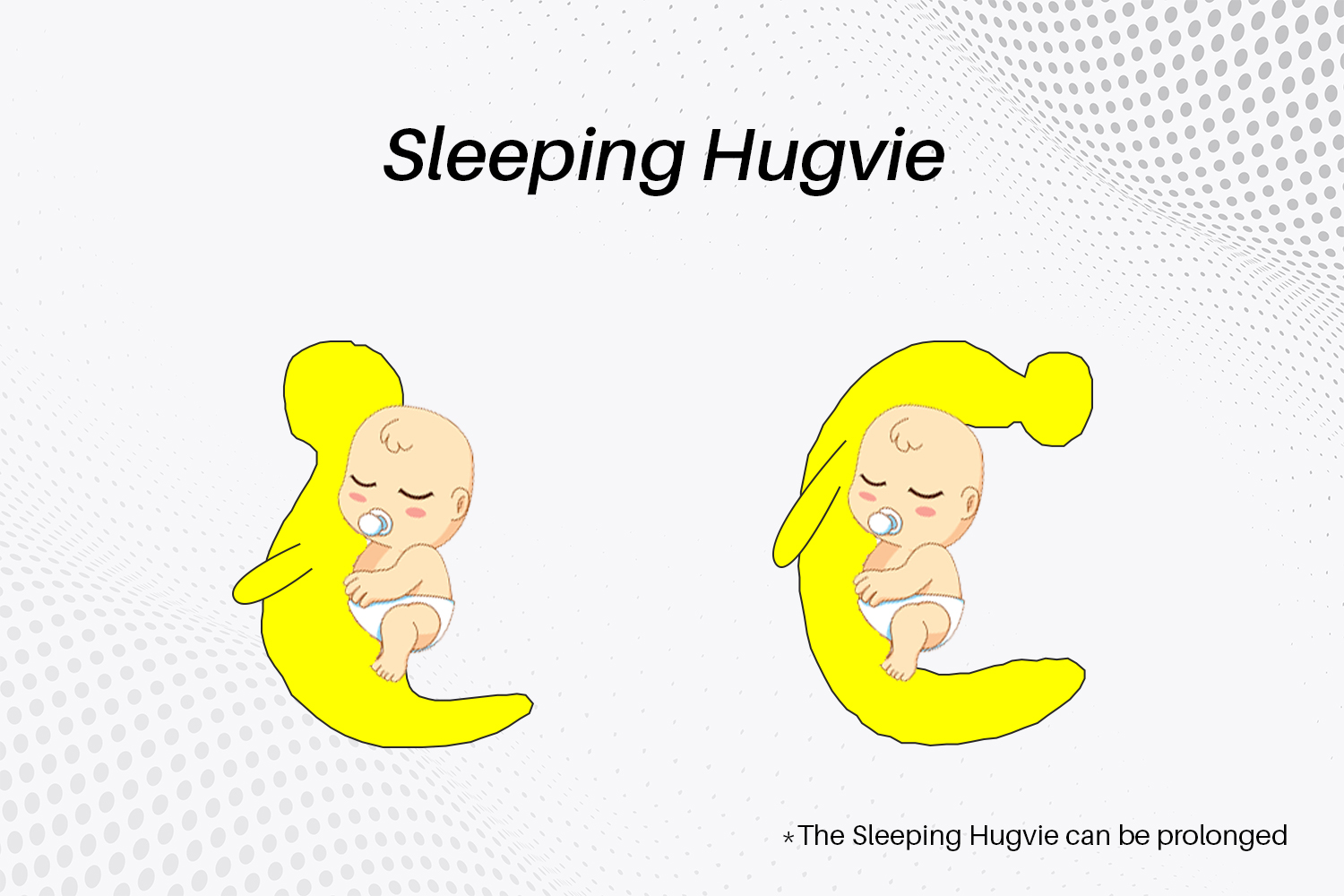
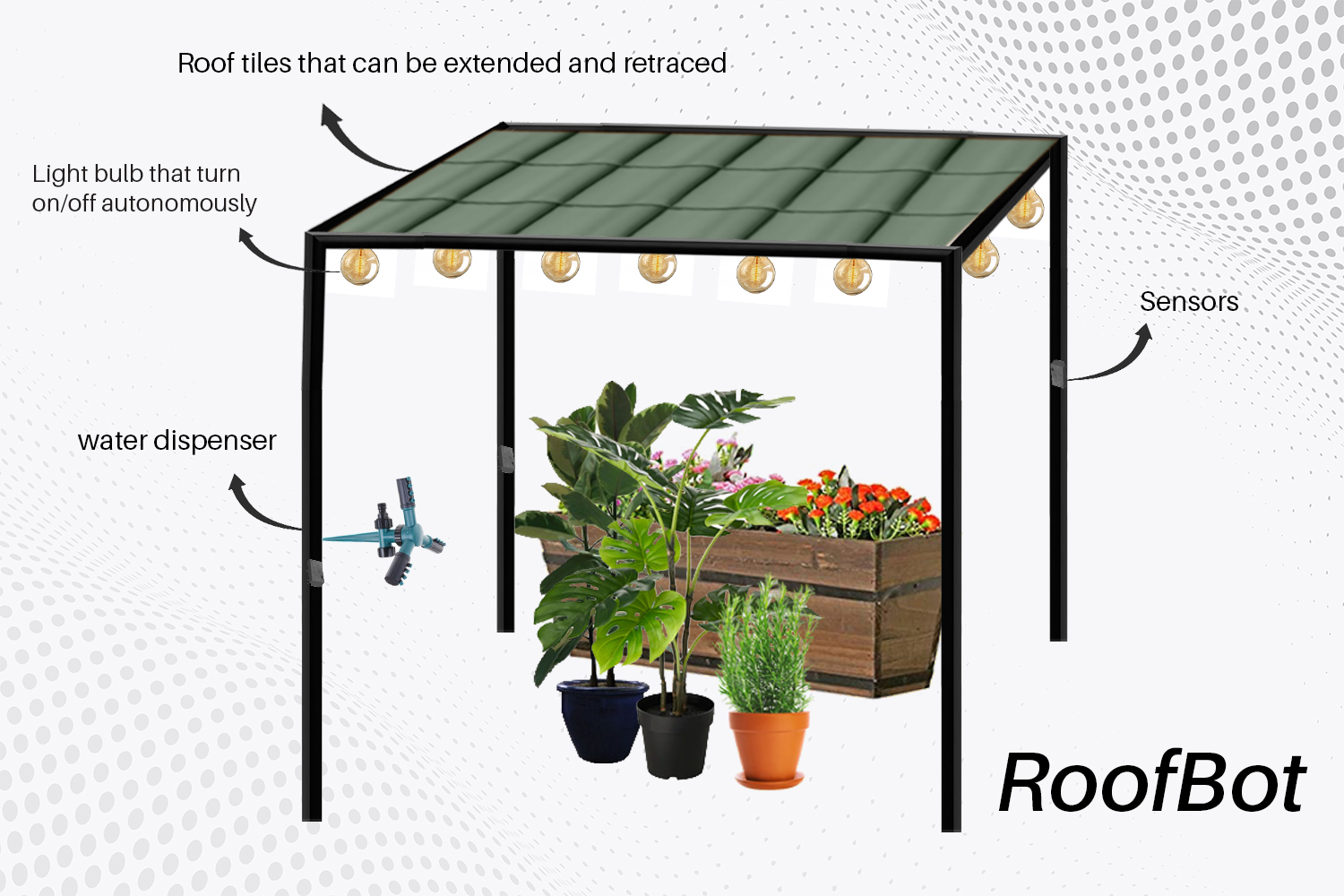 Fig.: RoofBot (image: Trần Hoàng Yến Nhi & Hoàng Vũ Thắng, Thành phố Hồ Chí Minh, Việt Nam)
Fig.: RoofBot (image: Trần Hoàng Yến Nhi & Hoàng Vũ Thắng, Thành phố Hồ Chí Minh, Việt Nam)