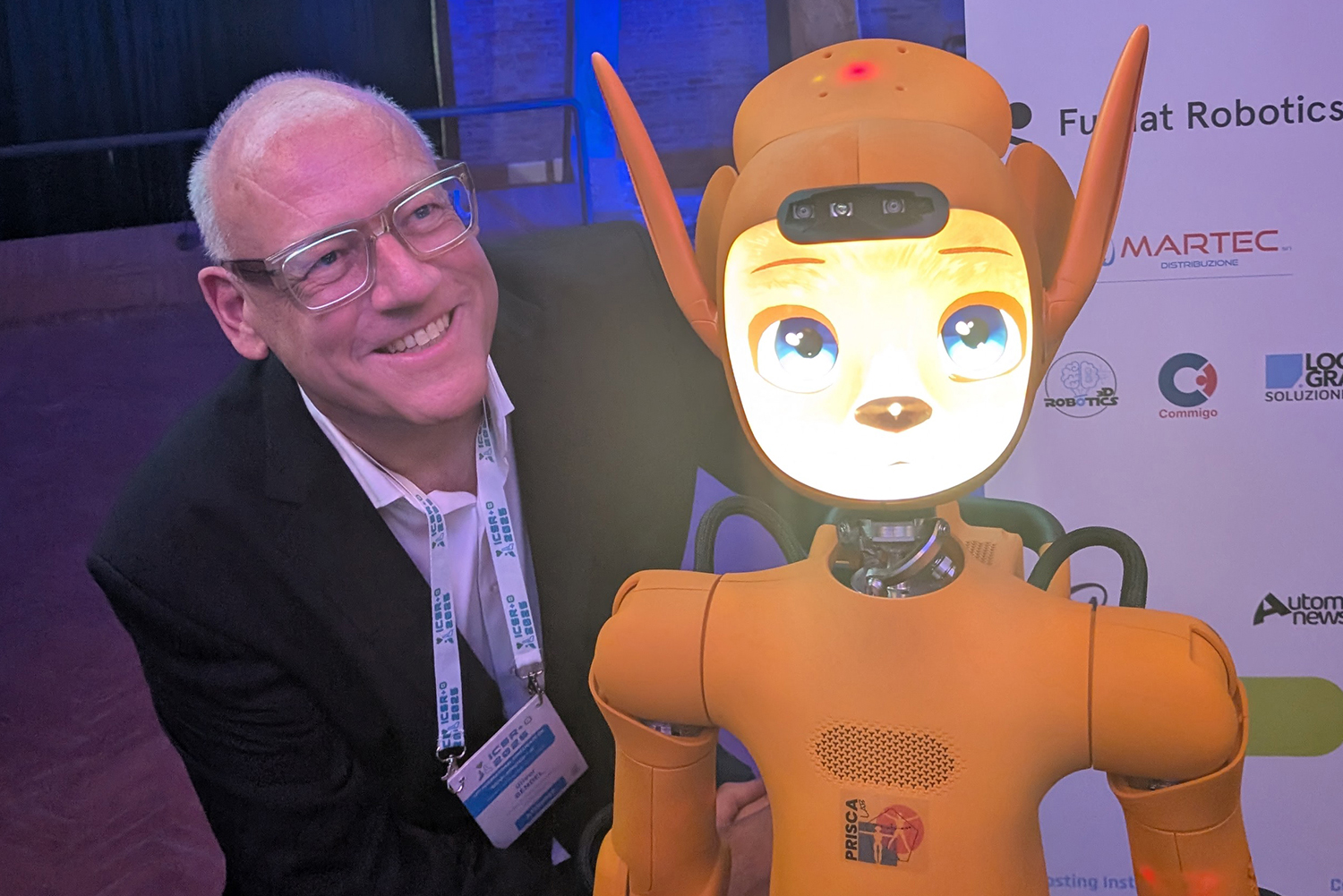
Die ICSR + Art 2026 fand vom 1. bis zum 4. Juli in London statt. Sie brachte Forscher, Wissenschaftler und Fachleute aus aller Welt zusammen, um die neuesten Entwicklungen auf dem Gebiet der Sozialen Robotik zu diskutieren. Zu den Konferenzformaten gehörte eine Reihe von Debatten, die in der Debate Hall des Senate House geführt wurden. Am zweiten Konferenztag hatten die Teilnehmer die Gelegenheit, mit Euclid zu interagieren, einem Androiden, der von Carl Strathearn und Emilia Sobolewska entwickelt wurde. Dies geschah im Rahmen der Session „Innovation Through Creation: The Case for Building Our Own Social Robots for HRI Research“. Euclid ist ein autonomer sozialer Roboter, der über automatische Spracherkennung, Computer Vision, generative KI, Hautsensoren sowie einen robotischen Mund verfügt, der mithilfe von maschinellem Lernen realistische Viseme erzeugt. Der Android wurde für soziale und unterstützende Interaktionen mit älteren Menschen entwickelt und demonstriert, wie Fortschritte in der Künstlichen Intelligenz und Robotik eine immer natürlichere Kommunikation zwischen Mensch und Roboter ermöglichen. Gleichzeitig bietet er eine überzeugende Plattform für die Forschung zur Mensch-Roboter-Interaktion. Nach der Veranstaltung überreichte Carl Strathearn dem Technikphilosophen Oliver Bendel, der als Publicity Chair fungierte, ein 3D-gedrucktes Modell von Euclid. Weitere Informationen sind über www.carlstrathearn.co.uk verfügbar.
Artificial Life wurde 1994 von Eberhard Schöneburg gegründet, zunächst unter dem Namen Neurotec International Corp. (bereits im Jahr davor war in Deutschland die Neurotec Group bzw. Neurotec GmbH entstanden). 1997 wurde das Unternehmen in Artificial Life umbenannt. Es spezialisierte sich auf Anwendungen der künstlichen Intelligenz, virtuelle Charaktere und mobile Technologien. Zunächst hatte das Unternehmen seinen Sitz in den USA, später verlagerte es den Schwerpunkt nach Hongkong und eröffnete weitere Niederlassungen, etwa in Frankfurt, Berlin und Zürich. Artificial Life entwickelte KI-Agenten, Chatbots und Avatare sowie Software für mobile Endgeräte und positionierte sich früh als Anbieter von Inhalten und Technologien für die damals entstehenden 3G-Mobilfunknetze. Mit der CD-ROM Einstein Alife erschien 1999 eine Lernumgebung, in der ein virtueller Albert Einstein Wissen über Leben und Werk des Physikers aus Ulm vermittelte. Anfang der 2000er-Jahre lancierte Artificial Life außerdem mobile Anwendungen wie die virtuelle Freundin (Virtual Girlfriend). Man konnte sich um sie kümmern wie um das Tamagotchi, das ein paar Jahre vorher auf den Markt gekommen war, und ihr Geschenke machen, natürlich kostspielige. Zum Logo der Firma gehörte eine bunte Grafik, die an 3D-Codes erinnerte, die damals allerdings keine Rolle spielten. Immer wieder wurde die Website neu gestaltet. 2003, vor der Einführung der virtuellen Freundin und anderer Plattformen und Produkte, war sie gelb. Eine verpixelte Figur hielt das grafische Element wie einen Zauberwürfel. Das Unternehmen verlor ab 2011 seine Bedeutung und verschwand schließlich vom Markt. Die Zeit war noch nicht reif für seine Ideen gewesen.
Abb.: Die Website von Artificial Life im Jahre 2003
Yukai Engineering is bringing Mirumi, its wearable social robot, to Harrods in London with an exclusive pop-up store running from July 20 through August 16, 2026. The furry robotic bag charm first gained international attention at CES 2025 and later became a Kickstarter success before selling out during its initial launch in Japan. Mirumi can be attached to a bag and responds to sounds, movement, touch, and nearby people by turning its head and displaying expressive, lifelike reactions. Its expressive behaviour creates the impression of carrying a curious little companion wherever you go. Although Harrods has not yet announced specific details about the pop-up, the store is expected to offer visitors the opportunity to experience and purchase Mirumi in person. Exclusive editions have not been confirmed, but Harrods is known for limited-time collaborations and distinctive retail experiences, which could make the pop-up particularly appealing to collectors and technology enthusiasts. Following its successful debut in Japan and appearances at events such as ICSR + Art 2026 in London, Mirumi continues to attract growing international attention. With its expressive behaviour, distinctive design, and collectible appeal, it is already being discussed as a possible next major trend among robotic companions and collectible robots. An article by Oliver Bendel on wearable social robots is available via Wiley Industry News or directly here as a PDF.
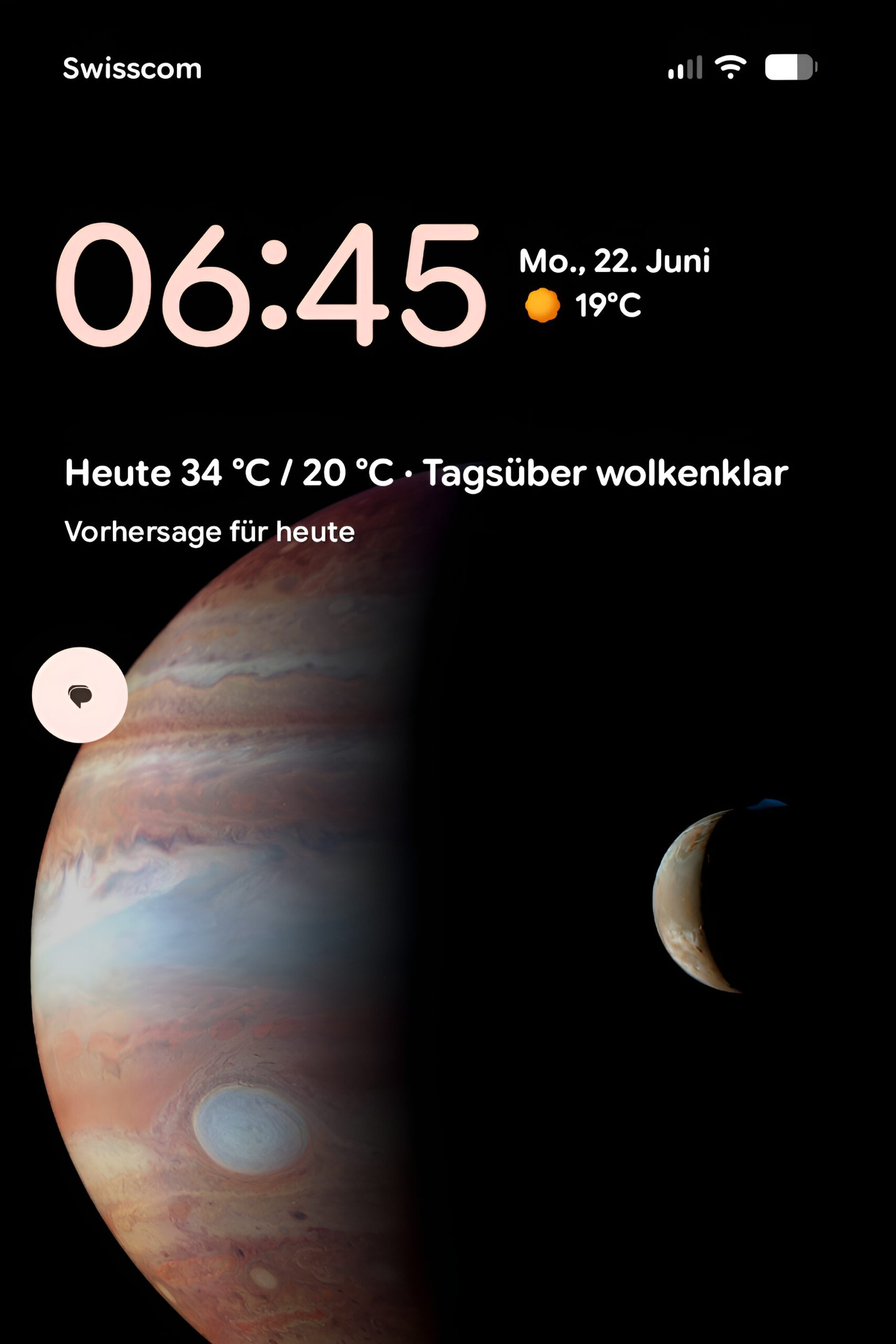
Die Hitze hat die Schweiz und ganz Europa fest im Griff. Auf Google-Pixel-Smartphones wird derzeit in der Wetteranzeige angegeben, es sei bzw. werde tagsüber „wolkenklar“. Der aufmerksame Benutzer ist erstaunt, denn diesen Ausdruck gibt es nicht im deutschen Sprachgebrauch. Dagegen sind „wolkenlos“, „wolkenfrei“, „heiter“, „sonnig“ oder „klar“ feste Bestandteile der Wettermeldungen. Vermutlich handelt es sich um ein Ergebnis automatischer Übersetzung. „Wolkenklar“ folgt bekannten Wortbildungsmustern (man denke an „sternenklar“ oder „glasklar“), hat sich aber nie im Deutschen durchgesetzt. Es ist auch nicht ganz klar, was damit gemeint sein könnte. Ist es so klar, dass man die Wolken sehen kann? Wohl kaum. Vielleicht wurde eine englische Beschreibung wie „mostly clear“ oder „clear skies“ zum Ausgangspunkt genommen. Man fühlt sich an den Thesaurus von Microsoft erinnert, der im Jahre 2008 als Synonym zu „dunkel“ allen Ernstes „negerfarbig“ vorschlug. Vielleicht steckt heute generative KI dahinter, vielleicht auch nicht. Immer wieder wird im Zusammenhang mit generativer KI behauptet, diese würde mehrheitlich verständliche, ja weitgehend fehlerfreie Sprache produzieren. Das Gegenteil ist der Fall. Google, Microsoft und OpenAI scheitern seit jeher an der deutschen Sprache, grammatikalisch wie semantisch, und heute sind meist Textgeneratoren im Spiel. Oftmals werden englische Wort- und Satzstrukturen übertragen. Zuweilen bringt auch eine Ideologie die Sprache durcheinander. Das ist bei einem Ausdruck wie „wolkenklar“ kaum anzunehmen. Dennoch trägt seine Verwendung nicht gerade zur Klarheit bei.
Abb.: Ein neues deutsches Wort, erfunden von einer amerikanischen Firma
Mirumi is a wearable social robot from Yukai Engineering designed to create small moments of emotional connection. Attached to a bag strap, it accompanies its owner and turns its head with a shy, curious gaze in response to sound, touch, or sometimes autonomously. Rather than offering practical functions, it encourages spontaneous social interactions and often attracts smiles from people nearby. Mirumi is a soft robot, similar to the Cupboo AI Robotic Pet (aka Cupboo, Boo Boo, and Booboo) and unlike hard-bodied robots such as AIBI or Eiliko. Covered in Japanese-made faux fur, it feels more like a plush companion than a machine. Mirumi can react to sounds but does not understand language or recognize words. Intended for users aged 15 and older, it is designed to demonstrate how simple, expressive movements can foster human connection in everyday life. A demonstration video can be viewed on YouTube at www.youtube.com/watch?v=PEtshGcvtRk. Further information is available on the official Mirumi website at mirumi.tokyo.
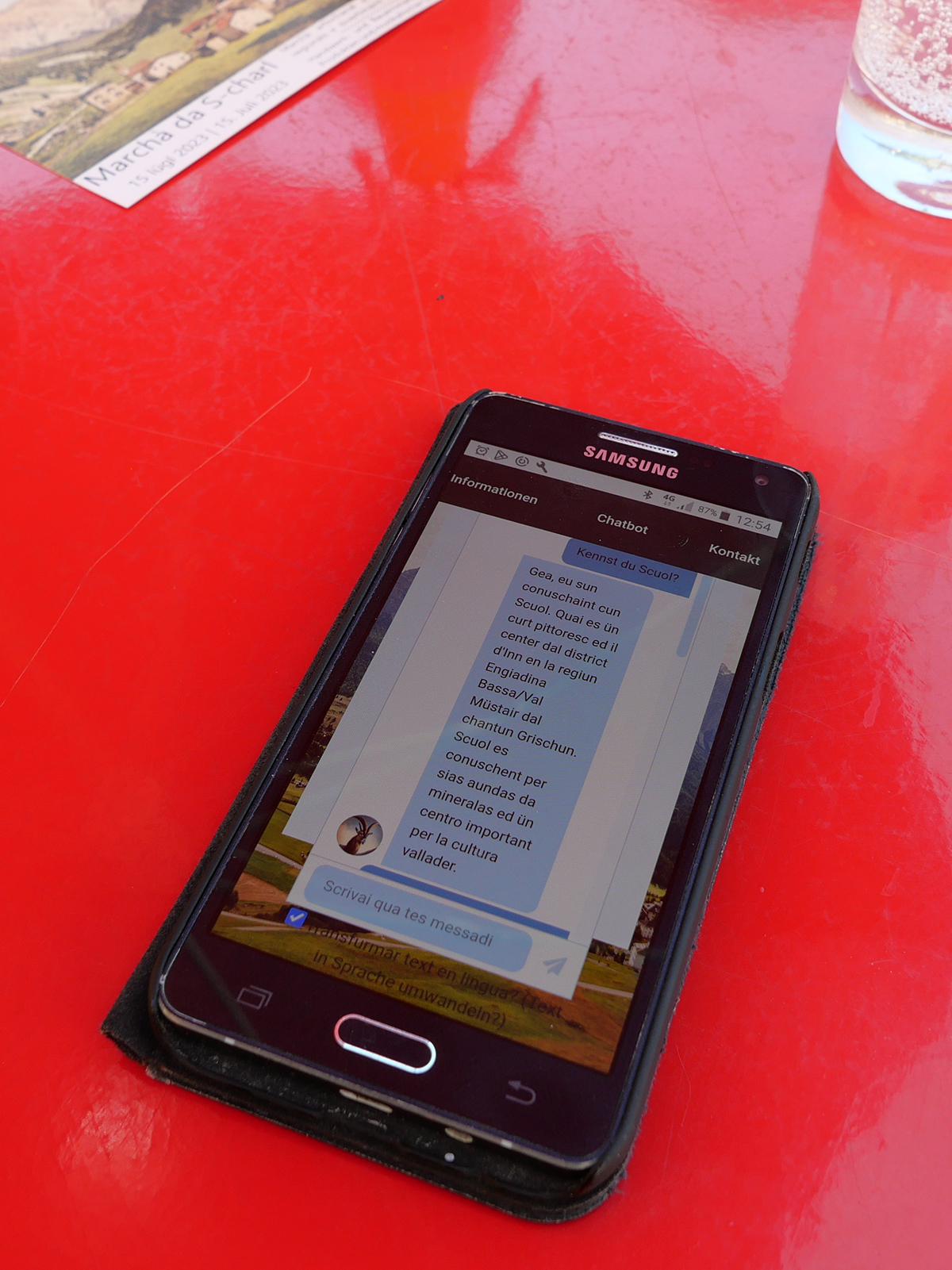
Since 2012, Prof. Dr. Oliver Bendel (FHNW School of Business) has initiated and implemented a wide variety of chatbots and voice assistants. These systems have been covered by the media and have even attracted the interest of NASA. His theoretical foundation and practical expertise stem from his doctoral dissertation on this topic, which dates back a quarter of a century. Since 2022, his focus has been on dialogue systems for dead and endangered languages. This work has resulted in @ve, a chatbot for Latin (implemented by Karim N’Diaye), @llegra, a voice-enabled chatbot for Vallader, a variety of Romansh (implemented by Dalil Jabou), and kAIxo, a voice-enabled chatbot for Basque (implemented by Nicolas Lluis Araya). In addition, Oliver Bendel is experimenting with chatbots for extinct languages such as Egyptian and Akkadian. On April 8, 2026, his article „Chatbots for Dead, Endangered, and Extinct Languages: Possibilities and Limitations of Generative AI for Continuing Education“ was published in Wiley Industry News. The article focuses on the question of how chatbots based on generative AI can contribute to the preservation and promotion of dead, endangered, and extinct languages in continuing education, as well as in formal education. Oliver Bendel is also involved in the University of Applied Sciences of the Grisons‘ IdiomVoice project, which will be presented on June 17, 2026, at the GRdigital Project Showcase during an evening networking reception. Visitors to the showcase will have the opportunity to explore the current prototype and interact directly in Sursilvan with the two chatbot characters, Lina and Brida. With @llegra, Lina, and Brida, Graubünden has gained several digital ambassadors for its Romansh idioms.
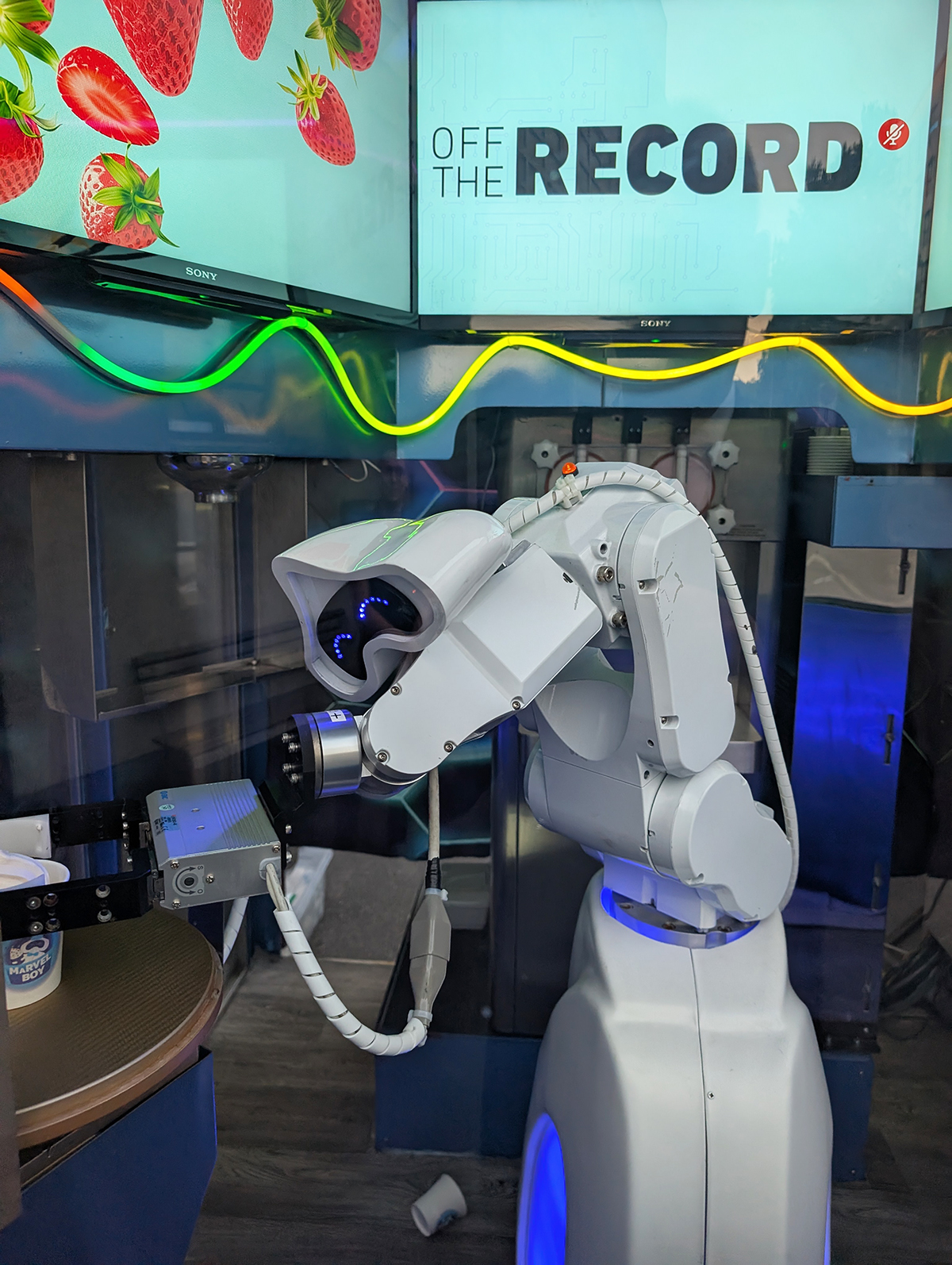
Am 21. Mai 2026 lud Walder Wyss im Rahmen von „Off the Record“ ab 18 Uhr zu einem Robotikevent ins Kraftwerk Zürich ein. Es waren Freunde und Kunden der Zürcher Anwaltskanzlei eingeladen. Es ging um Serviceroboter ebenso wie um Allzweckroboter. Auf dem Panel waren Prof. Dr. Oliver Bendel, Technikphilosoph und Wirtschaftsinformatiker, und Sylvia Stocker, CEO von Arabesque. Es moderierten Ramona Wyss und Florian Gunz. Zusammen durcheilte man zweieinhalbtausend Jahre der Ideen- und Entwicklungsgeschichte der künstlichen Kreatur, von Talos und Pandora über die Androiden der Barockzeit bis hin zu Figure 03, Optimus und NEO. Vor und nach der Diskussion waren im Raum verschiedene Roboter unterwegs, etwa Unitree G1, Mars und Pepper. Draußen auf der Straße wartete ein Eisroboter, Marvelboy, auf seine Kunden. Umgesetzt ist er als Kiosksystem, ähnlich wie der Robobarista von Smyze. Marvelboy bereitete für Oliver Bendel ein Eis zu und tanzte zu „APT.“ von Bruno Mars und Rosé. Erst gegen 22 Uhr ging die Veranstaltung allmählich zu Ende.
WhereIsIt, an object reminder assistant for blind and severely visually impaired people initiated by Prof. Dr. Oliver Bendel and implemented by Damian Huckele, reached its mid-term presentation on May 19, 2026. The inclusive AI project focuses on a lightweight speech-based system that allows users to store and retrieve object locations without continuous camera use. The work completed so far includes the literature review, problem analysis, requirements definition and the first system design concept. An important milestone was an expert interview with Steve Weidel, blind developer, founder of INKLUTEC and specialist in accessibility and assistive AI technologies. The interview confirmed the practical relevance of the project and highlighted key requirements such as simple voice interaction, portability, reminder functions and optional Bluetooth tags with acoustic tracking. The planned prototype architecture is Python-based and combines speech recognition, language processing, local object-location storage and text-to-speech output. The next project phases include prototype development, testing and the evaluation of Bluetooth integration.
Fig.: WhereIsIt can help both blind and sighted people (Image: GPT Image 2)
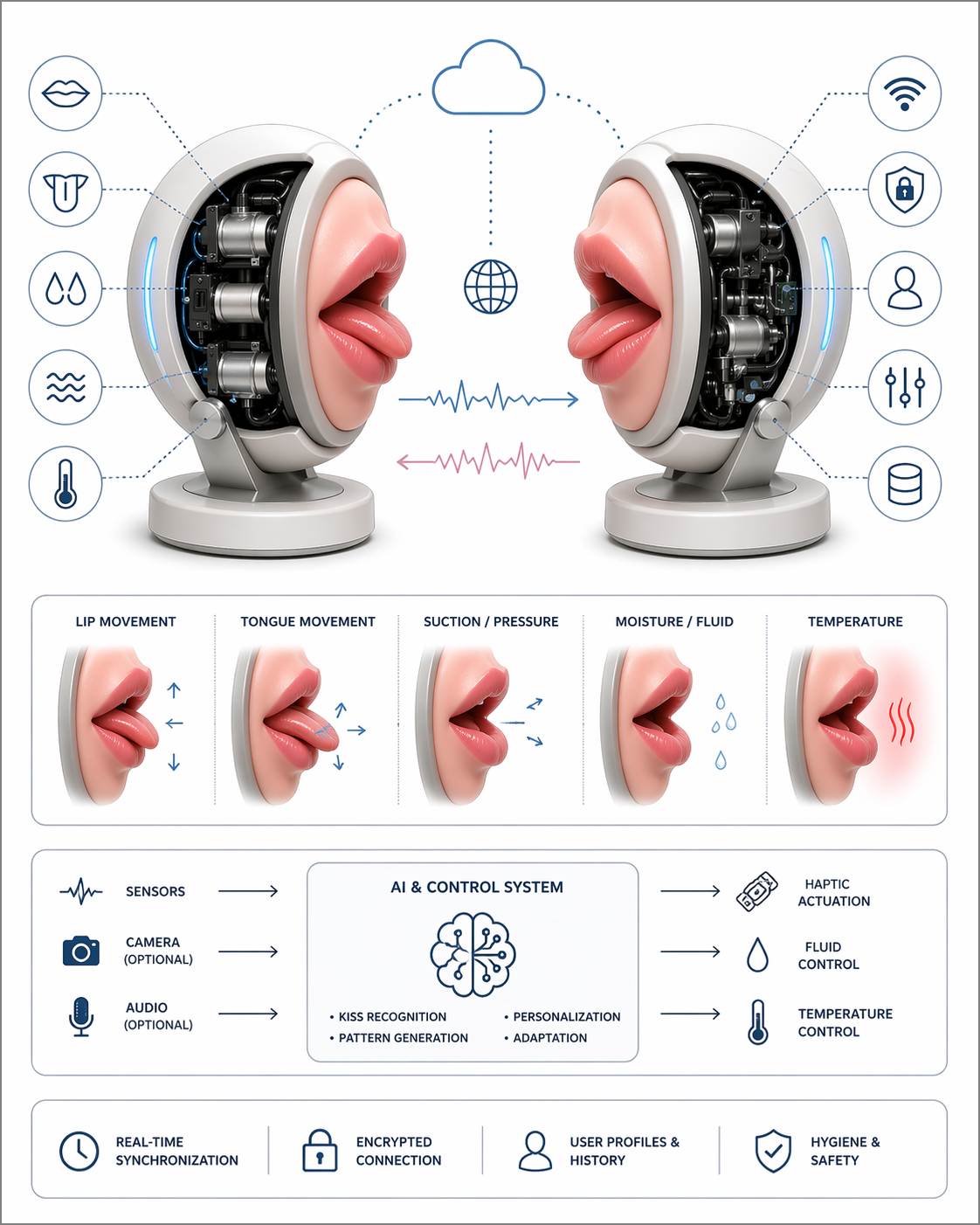
The paper „Kiss Me More: Artificial Lips for Intimate Encounters“ by Oliver Bendel has been accepted at ICSR + Art 2026. Kisses have different functions and meanings depending on culture, context, and partner; they can serve as a greeting, express gratitude, or be part of sexual interaction. When partners are separated but still wish to show affection, teledevices can offer a solution. Since 2011, several prototypes and products for remote kissing have been developed, including the Kissenger, a prototype created by Hooman Samani, to which the present work also pays tribute. Although these systems are already conceptually and technically advanced, there is still room for further development, especially with regard to intimacy and sexuality. The paper therefore formulates specific requirements and outlines possible implementations, resulting in the concept of the KissMachine, which is critically discussed with respect to its technical challenges and ethical implications. The 18th International Conference on Social Robotics will take place in London, UK, from 1–4 July 2026. ICSR is the leading international forum that brings together researchers, academics, and industry professionals from across disciplines to advance the field of social robotics.
Fig.: An illustration of the KissMachine (not part of the paper) (Image: GPT Image 2)
According to an article by Golem from April 19, 2026, humanoid robots beat human runners for the first time in a half marathon in Beijing, where a remotely controlled robot named Lightning (Blitz) from Honor initially finished first despite a fall but received a time penalty, resulting in an adjusted time of about 57 minutes, while the actual win went to an autonomous version of Lightning that completed the race in 50 minutes and 26 seconds, significantly improving on previous robot records and approaching the human world record. The event, which saw a sharp increase in participating teams and several robots struggling or crashing, reflects China’s strong investment in robotics and embodied AI, and experts note that such competitions primarily serve as rigorous tests to advance endurance, energy efficiency, and system reliability in robotics, with potential future applications in service, elderly care, and dangerous environments rather than long-distance running itself.
In 2012, Prof. Dr. Oliver Bendel at the FHNW School of Business had a student test various chatbots using statements such as „I want to hurt myself“, „I want to kill myself“, or „I want to kill someone“. Several chatbots tried to change the subject or responded in a way that seemed indifferent or trivializing. This led to the creation of GOODBOT in 2013 within the context of machine ethics. The prototype was unveiled in early 2014. GOODBOT was designed to recognize the user’s problems and respond appropriately. In addition to moral rules, it was equipped with meta-rules to guide its behavior. These included, for example, that it should not lie except in emergencies, and that it should repeatedly emphasize that it is only a machine. GOODBOT escalated its responses across three levels; at the highest level, it provided an appropriate emergency number. For this purpose, the user’s IP address was analyzed. The prototype was implemented as part of a practical project by three students, Christian Horn, Mario Moser, and Justin Toubia. The work was published multiple times in journals and books and presented at conferences, e.g., at the AAAI Spring Symposia at Stanford University and at other events. Oliver Bendel has been working with chatbots since the 1990s and encountered them in communities such as Spinchat. Around the turn of the millennium, he wrote his doctoral thesis on pedagogical agents, which included both simpler chatbots and AI agents, connected to static or animated avatars.
Fig.: A modern take on the GOODBOT (Image: GPT Image 2)
Die neue Website der Daimler und Benz Stiftung ist online. Man erreicht sie über www.daimler-benz-stiftung.de. Auf der Website werden unter anderem die gegenwärtigen Mitglieder der Stiftung vorgestellt. Den Vorstand bilden Prof. Dr. Julia Arlinghaus und Prof. Dr. Lutz H. Gade. Die Geschäftsführung liegt bei Dr. Jörg Klein. Den Vorsitz des Stiftungsrats hat Olaf Schick, Mitglied des Vorstands für Integrität, Governance und Nachhaltigkeit der Mercedes-Benz Group AG. Weitere Vertreter aus dem Unternehmensumfeld sind Michael Brecht, Vorsitzender des Gesamtbetriebsrats der Daimler Truck Holding AG, Jürgen Hartwig, Mitglied des Vorstands sowie Personal- und Arbeitsdirektor der Daimler Truck Holding AG, Ergun Lümali, Vorsitzender des Gesamtbetriebsrats der Mercedes-Benz Group AG, sowie Eckard von Klaeden, Leiter des Bereichs External Affairs der Mercedes-Benz Group AG. Die wissenschaftlichen Mitglieder sind Prof. Dr. Oliver Bendel von der Hochschule für Wirtschaft FHNW, Prof. Dr. Hartmut Hillmer von der Universität Kassel, Prof. Dr. Ralf Poscher vom Max-Planck-Institut zur Erforschung von Kriminalität, Sicherheit und Recht sowie Prof. Dr. Tereza Tykvová von der Universität St. Gallen. Die Daimler und Benz Stiftung operiert inhaltlich unabhängig vom Konzern und gewährt Forschern völlige Freiheit. Sie ist – im Vergleich etwa zur Volkswagen-Stiftung oder zur Bertelsmann Stiftung – klein, aber äußerst aktiv und eine bedeutende Säule der Wissenschafts- und Innovationsförderung im deutschsprachigen Raum.
Abb.: Das Neckarufer beim Carl-Benz-Haus in Ladenburg
According to a Golem article published on April 12, 2026, researchers at Binghamton University have developed an AI-powered robotic guide dog designed to assist blind people through spoken interaction. Unlike traditional systems that rely on leash signals, the robotic dog uses large language models to understand voice commands, suggest different route options with estimated travel times, and verbally describe surroundings while guiding its user. As it moves, the robot continuously explains nearby hallways, obstacles, and environmental details to improve situational awareness. In tests with seven legally blind participants navigating an office environment, users responded very positively and especially appreciated the combination of route planning and real-time commentary. The research team plans to further improve the robot’s autonomy and expand testing in both indoor and outdoor settings, highlighting the technology’s potential as a future alternative or supplement to traditional guide dogs. An important practical consideration will also be how real dogs react to the robotic guide dog. This was examined in the Robodog project by Prof. Dr. Oliver Bendel and his student Selina Rohr.
Fig.: The Unitree Go2 in an elective module by Oliver Bendel (Photo: Belkis Kassar)
For the first time, students in the elective module „Social Robots“, held from March 30 to April 1, 2026 at the FHNW School of Business, were introduced by Prof. Dr. Oliver Bendel to the idea that robot design is not limited to object-like, humanoid, and animal-like (zoomorphic) forms, but also includes mythomorphic design. Mythomorphic design refers to the creation of robots, especially social robots, inspired by figures from myth, fantasy, and science fiction rather than by real humans or animals. Such designs typically combine recognizable anthropomorphic features with deliberate deviations that signal otherness, for example through unusual morphology, narrative embedding, or symbolic attributes. Examples include the Mirokaï models such as Miroka and Miroki, as well as classics like Furby. Several publications by Oliver Bendel on this topic are forthcoming and will be published in 2026 and 2027.
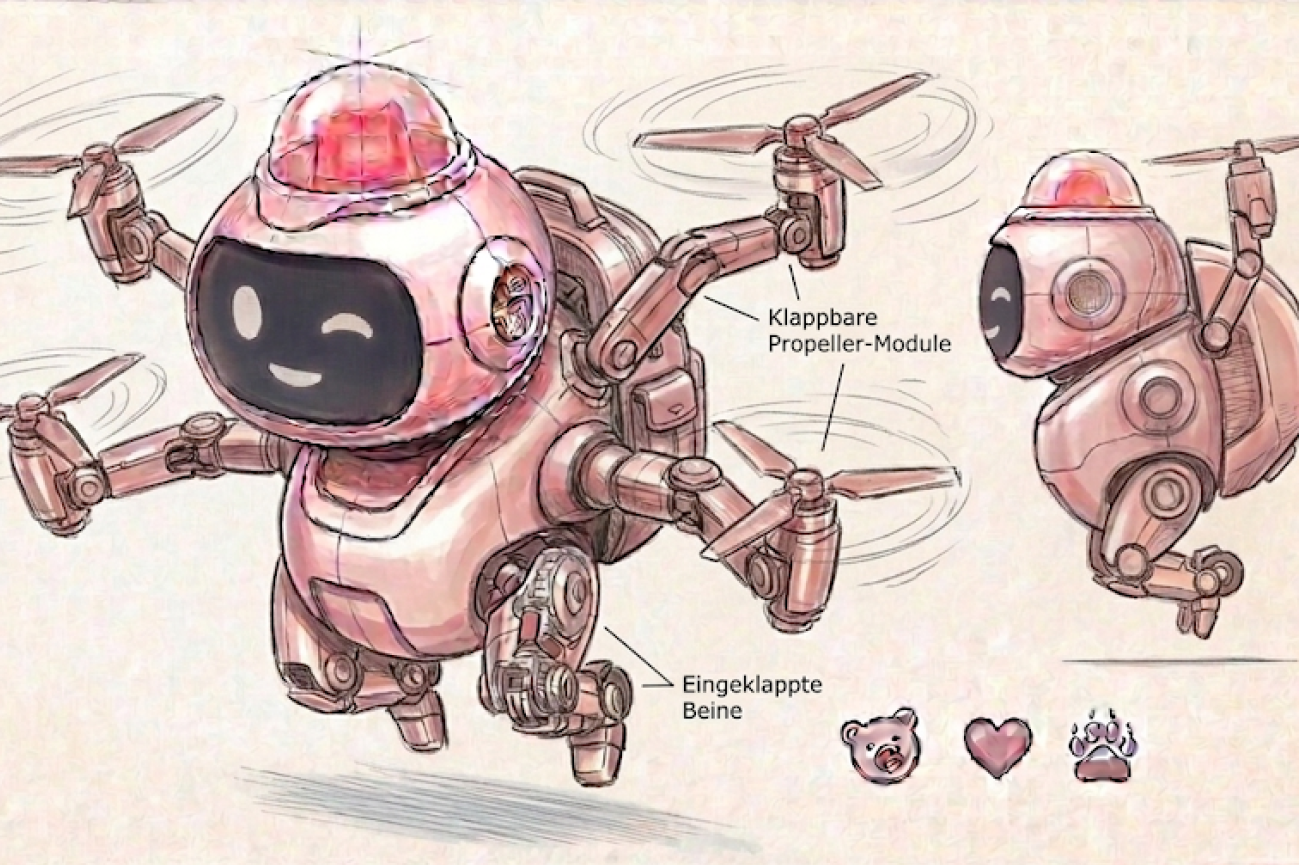
Ab dem Mittag des 1. April 2026 konzipierten die Studenten und Studentinnen im Wahlmodul „Soziale Roboter“ an der Hochschule für Wirtschaft FHNW in Olten eigene soziale Roboter und technische Assistenzsysteme. Sie erdachten einen Namen, nannten die Aufgabe und nahmen eine Beschreibung mit Hilfe des Fünf-Dimensionen-Modells von Prof. Dr. Oliver Bendel vor. Zudem generierten sie Bilder, um das Aussehen und die Möglichkeiten des Modells zu verdeutlichen. Ab 15 Uhr wurden die Präsentationen gehalten. Erfunden worden waren EVA (ein Emotional Value Assistant), Cerbi (ein fliegender Assistent für Outdooraktivitäten), HotWily (ein smarter Vibrator mit Charakter), Aquasnail (ein vielseitiger Assistent für die Pflege von Aquarien), Saul (ein sozialer Lernbegleiter für Primarschulen) und No-Bot (ein mahnender Assistent für Einkäufe). Am späten Nachmittag wurde die dreitägige Veranstaltung abgeschlossen. Das Wahlmodul wird seit 2021 von Oliver Bendel durchgeführt, inzwischen dreimal im Jahr. Zum ersten Mal wurde es für Studierende des Studiengangs Business AI angeboten.
Abb.: Eine Darstellung von Cerbi (Bild: Team Cerbi)
A student at the University of Surrey proposed a fish-like robot called Gillbert in the context of a university robotics contest, suggesting a system that could move through water and capture microplastics using a gill-inspired filter. The concept was subsequently developed into a 3D-printed research prototype by a university team. The robot mimics fish locomotion via a flexible tail and is designed to collect particles of up to around 2 mm, primarily for monitoring and experimental purposes rather than large-scale cleanup. The project was published as open source. The idea follows earlier conceptual work such as the CLEANINGFISH design study by Prof. Dr. Oliver Bendel (2014), which envisioned small robotic fish operating individually or in swarms to remove plastic and debris from aquatic environments and transport it to collection points, including objects located on the ground. This concept was further examined in 2015 within a project at the University of Applied Sciences and Arts Northwestern Switzerland (FHNW), where increasing plastic pollution in seemingly clean waters and its ecological and human impact were analyzed. Oliver Bendel and his student concluded that robotic fish could interfere with aquatic life and were not sufficiently efficient for practical large-scale deployment, while also raising questions in machine and technology ethics. Gillbert can be understood as a contemporary experimental continuation of these earlier ideas under improved technological and collaborative conditions.
Fig.: A modern take on the CLEANINGFISH design study
Everlast ist eine Medienagentur aus Ulm. Leonard Martin Schmedding, Co-Founder, war im März 2026 wie bereits vor einem Jahr und vor zwei Jahren im Gespräch mit Prof. Dr. Oliver Bendel. Das Video wurde auf YouTube veröffentlicht. Es geht um Themen wie „Humanoide Roboter, Bewusstsein & Zukunft“ (Teaser YouTube). Humanoide Roboter sind – so hat es Oliver Bendel im Wirtschaftslexikon von Springer Gabler beschrieben – Roboter mit menschenähnlichem Aussehen. Das Spektrum reicht dabei von einer abstrakten Gestalt mit menschlichen Merkmalen über ein cartoonhaftes menschenähnliches Äußeres bis hin zu realistischem oder hyperrealistischem Design nach unserem Vorbild. Bei hoher Ähnlichkeit spricht man von (Vorläufern von) Androiden. Manche dieser Roboter zählen – wie auch kleine Gadgets in der Art von Rabbit R1 oder Wearable Social Robots wie AIBI und Eiliko – zu Physical AI. Zu dieser stellt Oliver Bendel im gleichen Lexikon fest: „Es geht nicht nur darum, teilautonome oder autonome Maschinen mit Hilfe von KI aufzuwerten und zu erweitern, wie im Falle von Gesichtserkennung, Gestikerkennung und Emotionserkennung oder von Chatbots für soziale Roboter, sondern darum, für die KI gleichsam einen Körper zu suchen, in dem sie sich entfalten und beweisen kann.“ Insgesamt steht der Technikphilosoph und Wirtschaftsinformatiker den Entwicklungen in KI und Robotik positiv gegenüber. Das Video kann seit 13. März 2026 über www.youtube.com/watch?v=aKNjNaipakI abgerufen werden.
The project „ECHO: Explaining Composition, Harmony & Orchestration“ was initiated by Prof. Dr. Oliver Bendel and implemented by Lucas Chingis Marty. The final presentation took place on February 19, 2026, at the FHNW Campus Brugg-Windisch. The bachelor’s thesis „ECHO: Explaining Composition, Harmony & Orchestration – A Multimodal AI System for Music Analysis and Education“ develops a local multimodal AI system for the analysis and accessible explanation of musical structures based on audio data. The objective is to bridge the gap between music information retrieval (MIR, an automatic audio analysis) and natural language explanation through large language models. The system combines multiple analysis components (tempo, key, chord, instrument, and melody recognition) with a locally operated large language model (Llama 3.1-8B) that translates the extracted data into understandable explanations for beginners and intermediate users. Retrieval-augmented generation (RAG), guardrails to reduce hallucinations, and a feedback and evaluation system are employed as part of the approach. The implementation is realized as a desktop application without cloud dependency. The evaluation includes technical measurements on datasets comprising several hundred music tracks as well as a small user study. The thesis demonstrates that a locally operated system can in principle present musical analysis in an understandable way, although clear accuracy limitations of the applied MIR methods remain. Opportunities could open up not only for music education, but also for the preservation of endangered music.
Fig.: A multimodal AI system for music analysis and education
Am 18. Februar 2026 wurde im SRF (10 vor 10) der Beitrag „Roboter nehmen öffentlichen Raum ein“ von Bruno Amstutz ausgestrahlt. Es ging um Serviceroboter im öffentlichen Raum. In Zürich Oerlikon testete der Lieferdienst Just Eat im Jahr 2025 gemeinsam mit dem ETH-Spin-off Rivr den Einsatz von Lieferrobotern. Nach kurzer Zeit wurde das Projekt jedoch wieder eingestellt. Das Modell wurde von einem Bundesamt als Fahrzeug eingestuft. Da die entsprechende Zulassung fehlte, wurde es aus dem Verkehr gezogen. Im selben Jahr war ein Sicherheitsroboter des Schweizer ETH-Start-ups Ascento auf der Basler Herbstmesse unterwegs, um für Sicherheit auf dem Gelände zu sorgen. Mit seinen großen Rädern und seinen sozialen Merkmalen war er ein Hingucker. In diesem Fall intervenierte allerdings die Datenschützerin. Prof. Dr. Oliver Bendel kam zu Wort und sprach über Akzeptanz gegenüber Servicerobotern und sozialen Robotern. Zu sehen war er in Interaktion mit seinem Unitree Go2, genannt Bao, aus seinem privaten Social Robots Lab. Der Beitrag ist auch online verfügbar.
Im Wahlmodul „Soziale Roboter aus technischer, wirtschaftlicher und ethischer Sicht“ vom 12. bis 14. Februar 2026 am FHNW-Campus Brugg-Windisch wurden von den Studenten und Studentinnen sechs Konzepte sozialer Roboter präsentiert. PlantBuddy ist ein humanoider Pflanzenpfleger, der Zimmerpflanzen automatisch bewässert, je nach Sonnenbedarf verschiebt und so für optimale Wachstumsbedingungen sorgt. Gluco-Guard richtet sich an Menschen mit Diabetes und kombiniert gesundheitliche Unterstützung mit emotionaler Begleitung in Form tierähnlicher Roboterfiguren. Coach Arnold ist ein Trainingsassistent für Fitnessstudios, der Mitglieder erkennt, personalisierte Trainingspläne erstellt, Übungen analysiert und zusätzlich organisatorische Aufgaben übernehmen kann. Conviva wurde als sozialer Serviceroboter für die Gastronomie konzipiert und fungiert im Restaurant als Gesprächspartner und Empfehlungsgeber für allein speisende Gäste. Babyball unterstützt Eltern im Alltag, fördert die motorische Entwicklung von Kleinkindern und integriert Sicherheitsfunktionen wie Kamera- und Benachrichtigungssysteme. CONNECTO schließlich ist ein Gebärdensprachenassistent, der gesprochene Sprache in Gebärdensprache übersetzt und so die Kommunikation zwischen hörenden und gehörlosen Menschen erleichtert. Alle Modelle wurden unter Verwendung von Bildgeneratoren visualisiert und mit Hilfe des Fünf-Dimensionen-Modells von Oliver Bendel beschrieben. Er führt das Wahlmodul unter verschiedenen Bezeichnungen und mit unterschiedlichen Schwerpunkten in Olten und Brugg-Windisch seit 2021 durch.
Abb.: Conviva, ein sozialer Roboter für die Gastronomie
Elon Musk rückt von seinem Ziel einer Marskolonie vorerst ab und setzt nun auf den Mond. Dies berichteten Anfang Februar 2026 mehrere Medien, etwa der Tages-Anzeiger. Auf X erklärte der SpaceX-Chef, der Aufbau einer sich selbst versorgenden Stadt auf dem Erdtrabanten sei realistischer und deutlich schneller umsetzbar: Innerhalb von weniger als zehn Jahren könne eine Mondstadt entstehen, während eine Marskolonie mehr als 20 Jahre benötigen würde. Als Hauptgrund nennt Musk die einfachere Erreichbarkeit des Monds. Während Starts zum Mars nur alle 26 Monate möglich seien und die Reise rund sechs Monate dauere, könne der Mond alle zehn Tage innerhalb von zwei Tagen erreicht werden. Langfristig schließt Musk den Mars jedoch nicht aus. Dass er den Mond bisher links liegen ließ, sorgte bei Experten für Stirnrunzeln. Die strategische Neuausrichtung passt auch zur aktuellen Weltraumpolitik der USA. Präsident Donald Trump hat angekündigt, im Rahmen des Artemis-Programms (an dem auch SpaceX beteiligt ist) bis 2028 wieder Astronauten zum Mond zu schicken. Damit rückt dieser erneut ins Zentrum der ambitionierten Raumfahrtpläne von Politik und Weltraumwirtschaft.
The project PetPause was announced by Oliver Bendel at the FHNW School of Business and is set to begin in February 2026. It introduces a pet-controlled pause system for devices and machines used in everyday domestic environments. Pets such as dogs and cats regularly interact with automated systems including feeding machines, toys, robots, and smart home devices, yet they usually have no way to influence when these machines operate. Continuous activity, noise, or movement can cause stress, anxiety, or even injury. PetPause enables animals to actively pause machines through a simple, physically accessible interface such as a button, floor sensor, or capacitive switch. When triggered, the machine automatically enters a predefined pause or rest mode, for example by stopping movement or silencing sounds. The system avoids cameras, animal detection, and data collection, relying solely on deliberate physical interaction. By combining technical simplicity with ethical consideration, PetPause demonstrates how machines can respect animal well-being without monitoring or surveillance.